|
Aufgabenstellung
Es wird für die Postionsbestimmung des Motors eine Anordnung an Bipolaren Hall-Sensoren benötigt. Der Anschlussstecker soll dem Racing-Standard
http://www.roarracing.com/downloads/2010_ROAR_Rule_Book.pdf entsprechen. Als Aufnahme soll ein 3D druckbarer Halter eingesetzt werden.
Die Sensorplatine ist für 63mm 14 Pol Motor ausgelegt. Die Sensoren werden im 17.14° Winkel angeordnet.
Wozu werden Hall-Sensoren eigentlich eingesetzt? Worin liegen die Vor- bzw. Nachteile bei sensorbetriebenen Motoren? Lohnt sich das? Und überhaupt, was machen diese Sensoren genau? Der Motor-Controller (ESC) weiß im Stillstand des Motors nicht, in welcher Stellung sich die Magnete des Motors befinden und beginnt den sensorlosen Start des Motors auf Verdacht. Dabei lässt sich oft beobachten, dass der BLDC-Motor kurz in die falsche Richtung ruckt, um dann in der gewünschten Richtung zu drehen. Wird eine ausreichende Geschwindigkeit erreicht, so dass die back EMF des Motors (Generatorspannung) ausreicht um die Stellung der Magnete zu bestimmen, kann die Elektronik zielgerichtet die Kommutierung durchführen.
Der zufällige Start bedingt eine nicht vollständige Ausnutzung des Motordrehmomentes und kann durch den Einsatz von Hall-Sensoren optimiert werden. Drei Sensoren geben dem ESC die nötige Information über die Stellung der Magnete und ermöglichen so ein sicheres Kommutieren aus dem Stillstand. Viele ESC nutzen die Sensor Information nur vom Stillstand bis zur einer bestimmten Drehzahl (ESC abhängig und üblicherweise nicht einstellbar), bis die back emf ein sicheres Auswerten der Magnetstellung ermöglicht. Warum auf die Sensoren dann verzichtet wird, ist nicht in der Literatur beschrieben.
Hier wird im Video eindrucksvoll aufgezeigt, wie wirksam Sensoren sein können https://www.youtube.com/watch?feature=player_embedded&v=nuiNmyTZmXQ
Integrierte Hall-Sensoren im BLDC-Motor:
Vorteile
Nachteile
Externe Hall-Sensoren
Vorteil
Nachteile
Wo bestelle ich die dazugehörigen Bauteile?
Aktuell kann man sich keine Plug & Play-Version von der BamBam-Hallsensoren Leiterplatte kaufen! Auch bei anderen Anbietern müssen die Sensoren selber an die Leiterplatte gelötet werden. Eine Leiterplatte für die c63xx Motoren ist hier im Wiki aufgezeigt und ein paar grundsätzliche Tipps zum Thema “löten“ gibts hier. http://www.elektro-skateboard.de/wiki/bambam/bambam-boardcontroller-loeten
Eine Grundvoraussetzung damit die Platine eingesetzt werden kann, ist natürlich ein sensorfähiger Motor Controller (ESC). Bis zu einer Nennspannung von 6S hat man relativ viel Auswahl. Wird dieser Spannungbereich überschritten, wird die Auswahl geringer. Eine klare Empfehlung geht an dieser Stellen den Open Source VESC von Benjamin Vedder. Eine Liste mit weiteren ESC kann man sich hier ansehen:
Platinenversionen: Die BamBam-Halls Sensorplatine v1.4 funktioniert ausschließlich mit 63mm Motoren mit 14 Polen. Es gibt noch eine V1.0, die mit 59mm Motoren von Hobbyking, laufen soll.
Die Hall-Sensoren sollten auf der Platine aufliegen, damit diese sich nicht durch Vibrationen verbiegen können oder sogar die Anschlussbeine brechen. Die Sensoren sollten ca 1mm über die in der Motorglocke sichtbaren Magnete schweben. Der Sensorhalter sollte sich nicht verdrehen- oder in Schwingung geraten können.
Was gilt es in den Einstellungen zu berücksichtigen? (Timing) Muss der ESC speziell konfiguriert werden? Das kommt auf den ESC an. Die einen erkennen die Hall-Sensoren von selbst. Bei anderen muss der Hall-Sensoren Betrieb aktiviert werden. Wenn die Sensoren völlig ungünstig stehen, kann es passieren, dass der BLDC-Motor unwillig in der falschen richtung dreht und Geräusche von sich gibt. Wer eine Strommesszange hat oder ein Amperemeter mit einem Messbereich von bis zu 20A kann das Messgerät einen BLDC-Motor-Anschluss einschleifen und die Sensor-Halterung solange vorsichtig verdrehen, bis ein Strom Minimum gemessen wird. Eine Englische Montage-Anleitung: (http://e0designs.com/documentation/finding-motor-phase-sensor-combinations/)
Wie kann ich mir eine Halterung drucken, ohne einen eigenen 3D-Drucker zu kaufen? Eine übersichtliche Liste von 3D-Dienstleister findet man z.b hier. Dabei gilt zu beachten, dass hochwertige 3D-Druckverfahren mehr kosten als einfache Extruder-Verfahren mit den Standartmaterialien «ABS & PLA» Aufgrund der möglichen Wärmeeentwicklung, wird das temperaturwiederstandsfähigere Material «ABS» ganz klar empfohlen! http://3druck.com/lieferantenhaendler Die vorgestellte Hartplastik-Halterung mit der leuchtenden Plexiglass-Abdeckung von Gerald-z sieht ganz schön aus.. wo krieg ich die her? Gerald-z: “Es ist kein offizieller Verkauf oder eine Serienproduktion von der Halterung/Abdeckung vorgesehen. Sollte jedoch Interesse besteht. Einfach anschreiben. Gerald-z Meine Halterung und Abdeckung passt nur für den C6374 Motor mit dem Sesorbord V1.3. Außendurchmesser Motor 63mm.”
Was passiert wenn die Platine während einer Anwendung ausfällt? Das kommt jeweils auf den ESC an. Einige ESC stellen den Bertieb ein und können blockieren. Andere gehen alls “fall back” in den sensorlosen Betrieb über.
ESC-Reaktion bei einem Ausfall oder einem Defekt der Hallsensorplatine:
Anschlussbuchse Das Layout wurde so gestaltet, das die Buchse sich von vorn- und hinten anlöten lässt. Die Buchse muss dann entsprechend gedreht werden.
Pin 1 ist bei der Draufsicht auf die Leiterplatte rechts. Pin 1 ist oft rechteckig im Layout.
Layout

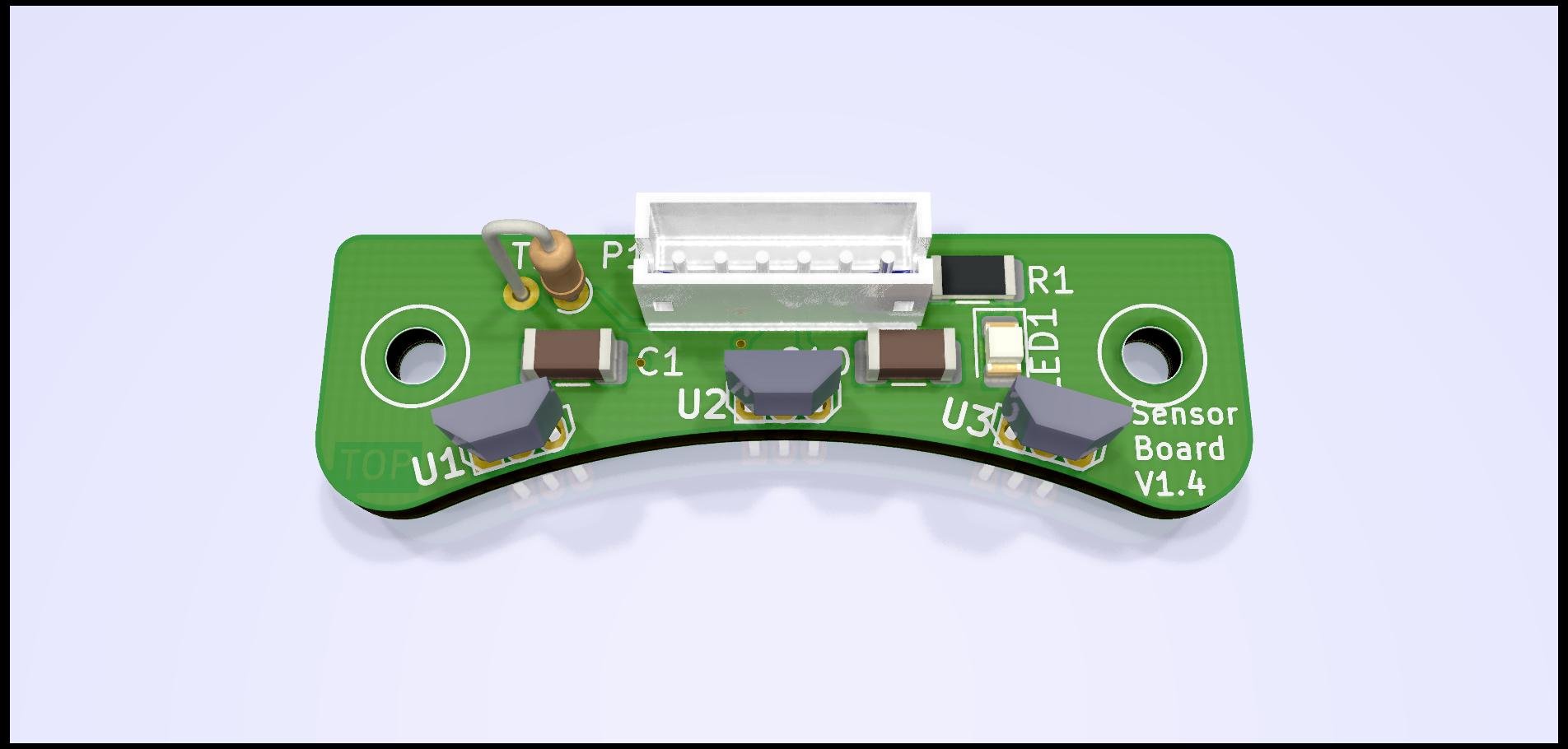
PCB 3D Darstellung

Hall-Cut

PCB bestückt

Hall-Sensor-Halter
von eXo

Gerald-Z

Nutzerstimmen
Gerald-z
Im Trockenlauf funktioniert alles perfekt. Stromaufnahme mit oder ohne Sensoren ist ohne Last gleich.
 Ich verwende den xerun 150a. Der ESC macht einem das einstellen des Winkel sehr leicht.Hat man die Phasen nicht richtig angeschlossen. Läuft er erst gar nicht an oder der Motor dreht hoch und blockiert bei Erhöhung der Drehzahl. Wenn dann alle Phasen richtig angeschlossen sind läuft der Motor so einiger massen. Ob der Winkel Stimmt hört man eindeutig am Motor. Ich verwende den xerun 150a. Der ESC macht einem das einstellen des Winkel sehr leicht.Hat man die Phasen nicht richtig angeschlossen. Läuft er erst gar nicht an oder der Motor dreht hoch und blockiert bei Erhöhung der Drehzahl. Wenn dann alle Phasen richtig angeschlossen sind läuft der Motor so einiger massen. Ob der Winkel Stimmt hört man eindeutig am Motor.
Gas ca 30% und den Winkel ändern. Der Motor wird bei dem passenden Winkel leiser und läuft nicht mehr so rau. Ist man darüber, wirkt der Motor angestrengt.
Das ganze kann man auch bei der gesamten Stromaufnahme beobachten.
Ist der Winkel richtig. Dann ist die Stromaufnahme am niedrigsten.
Ich habe gestern eine umfangreiche Testfahrt im Gelände gemacht.Da ich einen Temperaturfühler im Motor habe. Konnte ich eine Verbesserung gegen über ohne Sensoren feststellen. Der Test hat auf der Hausstrecke stattgefunden. Der sehr langsame öfters nur ca 4km/h über Stock und Stein zulässt. Im großen und ganzen nur Starke Steigungen und Gefälle. vmax 15km/h. Die Motoren sind ca 10 Grad kühler geblieben.
 Wie stark sich das auf die Reichweite auswirkt kann ich jetzt noch nicht sagen. Jedenfalls benötige ich jetzt beim Anfahren um einiges weniger Strom. Wie stark sich das auf die Reichweite auswirkt kann ich jetzt noch nicht sagen. Jedenfalls benötige ich jetzt beim Anfahren um einiges weniger Strom.
eXo
Die Motoren drehen je nach Untergrund einfach kompromisslos durch. Gegenfrage: Gibt es was geilers?
Alle Dateien, Layout und STL-Files, befinden sich im GIT von Kai
Git
git clone http: //git.esk8b.de/bambam-hallsensor-extension Download https://github.com/esk8b/bambam-hallsensor-extension
Neuerung 2019
KiCAD Version 5.10 Anpassungen
Alle Bauteile wurden an die Version KiCAD 5.10 angepasst.
Projektbeteiligte
-> Halter: eXo, Gerald-z
-> Entwurf Kontur der Leiterplatte und Halter: Gerald-z
-> Leiterplatte: Barney
-> Tests: Gerald-z, SAG, Kai, eXo
|
 Die Beschleunigung hat sich auch verbessert. Ohne Sensoren ist es öfters passiert, dass ich zu viel Gas gegeben haben und das System kurzzeitig rumspackte. Ist mit den Sensoren nicht mehr passiert.
Die Beschleunigung hat sich auch verbessert. Ohne Sensoren ist es öfters passiert, dass ich zu viel Gas gegeben haben und das System kurzzeitig rumspackte. Ist mit den Sensoren nicht mehr passiert.