barney Geschrieben 29. April 2015 Geschrieben 29. April 2015 - Motor läuft mehr oder weniger gesund über +/- 5mm Verschiebeweg (okay) Auch im besten Fall klingelt der Motor ein wenig (was er ohne Hallsensoren nicht tut). Ich denke das liegt daran dass wir die 17,14 Grad noch nicht genau getroffen haben. 1. Ist das Klingeln so stark (Stromaufnahmen der einzelnen Motorphasen differieren erheblich?) das was gemacht werden muss? Kannst du die Sensoren außen so anlöten, dass die geforderten 17.14° erreicht werden und das Ergebnis verifizieren? 2. Muss gezwungenermaßen die Leiterplatte neu aufgelegt werden (Verschrotten der 30 Restplatinen)? VG Barney Zitieren
eXo Geschrieben 29. April 2015 Geschrieben 29. April 2015 Sind mir so früh morgens ein paar Noobfrage gestattet ohne das man mich auf der Stelle steinigt? Wenn ich unsere Leiterplatte mit dem PCB von 0design vergleiche, sehe ich auf unserem Resistenzen (lassen wir den Vorwiederstand fürs LED mal aussenvor) und Kondensatoren, welche ich auf dem andern Modell nicht erkennen kann. Da wir diese Mini SMD-Komponenten ja bestimmt nicht nur aus Spass verlöten, möchte ich gerne wissen was wir aus diesen Komponenten für einen Nutzen gewinnen?!? Was macht unsere Platine aus technischer Sicht den anderes als die von 0Design, mal abgesehen davon das unsere schön blau leuchtet? Und korrigiert bitte mich falls ich das nicht richtig sehen, aber es wird wohl kein Weg an unterschiedlichen Grössen für die individuellen Motoren vorbei führen, oder? Dann noch etwas. Damit die Kosten bei solchen Entwicklungsprozessen nicht allein vom arbeitenden Entwickler getragen werden müssen, würde ich ein Paypal-Spendenkonto empfehlen. Das geht ganz fix, ist super flexibel und wir könnten die Geldbörse von unserem Entwickler entlasten, welcher bereits kostenlos für uns arbeitet. Falls die Platinen wirklich nicht zu gebrauchen wären, lasst sie uns wie vorgeschlagen in einen sicheren Reflow-Prozess investieren. Da wären sicher viele Dankbar! Zitieren
barney Geschrieben 29. April 2015 Geschrieben 29. April 2015 Sind mir so früh morgens ein paar Noobfrage gestattet ohne das man mich auf der Stelle steinigt? Wenn ich unsere Leiterplatte mit dem PCB von 0design vergleiche, sehe ich auf unserem Resistenzen (lassen wir den Vorwiederstand fürs LED mal aussenvor) und Kondensatoren, welche ich auf dem andern Modell nicht erkennen kann. Da wir diese Mini SMD-Komponenten ja bestimmt nicht nur aus Spass verlöten, möchte ich gerne wissen was wir aus diesen Komponenten für einen Nutzen gewinnen?!? Was macht unsere Platine aus technischer Sicht den anderes als die von 0Design, mal abgesehen davon das unsere schön blau leuchtet? Das sollte deine Frage beantworten: Wenn du mit innerlicher postivien Neigung den Schaltplan ließt, ist zu erkennen, dass fast alle Kondensatoren und Widerstände optional sind und nur bestückt werden müssen, wenn Probleme auftreten. Ich kenne den Reflex, erstmal alles zusammenzubauen und dann die Dokumentation zu lesen. :devil: Die 680pF filtern HF-Störungen im Schaltsignal aus. Die 10k Widerstände werden nur benötigt, wenn der ESC keine Pull up Widerstände hat. Und korrigiert bitte mich falls ich das nicht richtig sehen, aber es wird wohl kein Weg an unterschiedlichen Grössen für die individuellen Motoren vorbei führen, oder? Bei großen Abweichungen ja. Dann noch etwas. Damit die Kosten bei solchen Entwicklungsprozessen nicht allein vom arbeitenden Entwickler getragen werden müssen, würde ich ein Paypal-Spendenkonto empfehlen. Das geht ganz fix, ist super flexibel und wir könnten die Geldbörse von unserem Entwickler entlasten, welcher bereits kostenlos für uns arbeitet. Falls die Platinen wirklich nicht zu gebrauchen wären, lasst sie uns wie vorgeschlagen in einen sicheren Reflow-Prozess investieren. Da wären sicher viele Dankbar!Das würde ich begrüßen. Wir haben hier mehrere Entwickler für die Hall-Sensoren. Wer soll das Geld zentral bekommen (Kai?) und wie würde der Abruf des Geldes aussehen? Oder war angedacht, dass ich den Reflow-Prozess durchführe? Wenn ich die 30 Leiterplatten verschrotte, würde ich mich über eine Kostendeckung freuen. Zitieren
eXo Geschrieben 29. April 2015 Geschrieben 29. April 2015 (bearbeitet) Vielen Dank für die ausführliche Erklärung, Barney! Das Video dazu werde ich mir später ansehen. Die Firewall ist leider kein Freund von Youtube. Grrr! Zum Thema „Spenden“ gibt’s hier n paar grundsätzliche Infos: Externe Links nur für Mitglieder sichtbar Wie du richtig schreibst, müssten wir vor allem organisatorische Punkte abklären. Wie wollen wir das Geld verwalten? Wer wird es verteilen? Und wie wollen wir die Spenden transparent präsentieren? Das Interesse am Hallsensorboard wird garantiert zunehmen, den die Preisvorstellung von 0designs ist einfach zu krank. Trotzdem hätte ich mir davon 2-4 Sets gekauft, weil ich einfach nicht auf Sensoren verzichten mag und es halt nicht wirklich andere Lösungen gibt. Damit will ich eigentlich sagen, von mir würdest du sofort 100 Euro kriegen, damit wir ein richtig geiles Produkt für unterschiedliche Ausführungen entwickeln und herstellen können. Wenn sich noch ein paar Finanziell beteiligen, sollten wir die Kosten relativ einfach abdecken. Mal angenommen wir hätten plötzlich zu viel Budget, finden wir bestimmt noch weitere Verbesserungen oder Barney kriegt beim Italiener um die Ecke ne leckere knusprige Pizza aus dem Holzofen, ohne PCB Nachgeschmack. bearbeitet 29. April 2015 von eXo 1 Zitieren
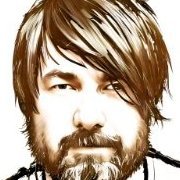
gerald-z Geschrieben 29. April 2015 Geschrieben 29. April 2015 Hab etwas experimentiert. Herausgekommen ist ein Sensorhalter der an der Motorhalterung festgeschraubt wird. Mit Hilfe einer Schablone werden zwei Löcher in die Motorhalterung gebohrt in einem Abstand von 9mm. Bei einem Abstand von 9mm kann der Halter +/- 9 Grad verstellt werden. In Summe 18 Grad. Die Beiden Schrauben M3 werden nur leicht angezogen. Damit der Winkel noch verändert werden kann. Ist alles richtig eingestellt. Sensorplatte mit Abdeckung abschrauben. Die beiden Schrauben festziehen und alles wieder zusammenbauen. Der Halter liegt mit dem Absatz am Motor direkt an. Und stehlt denn benötigten Abstand von 1mm zu den Sensoren sicher. = 17.14 Grad Zur Verständnis hab noch ein paar Bilder gemacht. Zitieren
gerald-z Geschrieben 29. April 2015 Geschrieben 29. April 2015 Ach ja bei bedarf können die Sensoren an der Abdeckung festgeklebt werden. Hier das Bild von der Winkeleinstellung. Zitieren
eXo Geschrieben 29. April 2015 Geschrieben 29. April 2015 (bearbeitet) Könntest du das Teil bitte an deinem Motor(halter) befestigen? Ich schnalls nicht.. Wie siehts zeit und kostenässig aus? Das geduckte Teil nimmt +-1h in Anspruch und kostet ein paar Cent. Kannst du das schneller und billiger fräsen? Das Endresult läuft ja ungefähr aufs gleiche hinaus. bearbeitet 29. April 2015 von eXo Zitieren
yoma Geschrieben 29. April 2015 Geschrieben 29. April 2015 1. Ist das Klingeln so stark (Stromaufnahmen der einzelnen Motorphasen differieren erheblich?) das was gemacht werden muss? Kannst du die Sensoren außen so anlöten, dass die geforderten 17.14° erreicht werden und das Ergebnis verifizieren? 2. Muss gezwungenermaßen die Leiterplatte neu aufgelegt werden (Verschrotten der 30 Restplatinen)? VG Barney Ich würd da jetzt noch keine Hand ins feuer legen, daß man das "klingeln" nicht noch durch eine bessere Positionierung wegkriegt. Prozedur gestern nacht war "irgendwie hinhalten" daß es möglichst gut klingt und der Strom ungefähr minimal ist (eine Hand am Gashebel, eine Hand an der Hallplatine), Position "merken", und dann mit der Heißklebepistole circa da hintackern........... Um eine Entscheidung zu treffen wäre eine solide Positionierung gut, das Ding von gerald-z sieht super aus! Auch radial sollte die Position stimmen, ein Millimeter mehr Entfernung vom Motor bringt 0,3° Fehler. Und 0,3° mechanisch sind 2° elektrisch. yoma Zitieren
gerald-z Geschrieben 29. April 2015 Geschrieben 29. April 2015 Damit bei einem 63mm Motor der Winkel stimmt muss 1mm Abstand zu den Sensoren gehalten werden. Bei der Zeichnung wurde der Abstand von 1mm schon berücksichtigt. Aber Barneys Platinen stimmen nicht ganz und haben nur ca 16.5 Grad. Daher sollten die Sensoren etwas auseinander stehen um auf die 17.14 Grad zu kommen oder alternativ den Abstand von 1mm verringern. Zitieren
barney Geschrieben 30. April 2015 Geschrieben 30. April 2015 Ich würde da jetzt noch keine Hand ins Feuer legen, dass man das "klingeln" nicht noch durch eine bessere Positionierung weg kriegt. Prozedur gestern Nacht war "irgendwie hinhalten" daß es möglichst gut klingt und der Strom ungefähr minimal ist........... Kommt noch ein nachgiebige Prüfung von dir, wo du mehr Zeit und Muße dafür hast? Ich habe das Layout schon geändert und gebe es euch bald zur logischen Prüfung. Die Bohrungen 0.7mm und Padform ist jetzt oval 1.1/1.5mm. Der Winkel sollte jetzt 17.1 sein. Zitieren
yoma Geschrieben 30. April 2015 Geschrieben 30. April 2015 Ja, ich hab noch mehr vor. Ich würde gerne den Motor leer (mit Akkuschrauber) drehen und mir die induzierten Phasenspannungen vs. Hallsignale anschauen, da müssten wir es ganz genau sehen. Hoffe ich schaff den ersten Versuch dieses WE. Barney, was schätzt Du, um wieviel Zehntel-mm muß ich die äußeren Geber nach außen biegen? Mit meinem Turnigy 6364 SK3 hab ich 59mm Durchmesser, Sensoren etwa bei 60mm. Das ist wofür die Platine gebaut ist, oder? Kriegt das neue Layout Langlöcher zur Befestigung? yoma Zitieren
eXo Geschrieben 30. April 2015 Geschrieben 30. April 2015 Mit meinem Turnigy 6364 SK3 hab ich 59mm Durchmesser, Sensoren etwa bei 60mm. Das ist wofür die Platine gebaut ist, oder? Die Platine ist für C64xx Motoren ausgelegt. Die SK3 von HK bilden mit ihren 59mm Durchmesser eine Ausnahme. Die Langlöcher auf der Platine sind meiner Meinung nach nicht unbedingt nötig, wenn man die Halterung 360° vertsellen kann. Oder mache ich da einen Überlegungsfehler? Zitieren
barney Geschrieben 30. April 2015 Geschrieben 30. April 2015 Guter Hinweis mit den kleineren Motoren. Da müsste die Platine im Winkel perfekt passen. Zitieren
barney Geschrieben 30. April 2015 Geschrieben 30. April 2015 Langlöcher sind kein Muss. Kommt auf den Halter an, was der kann. Ich mache auch Langlöcher. Legt was fest. Zitieren
barney Geschrieben 30. April 2015 Geschrieben 30. April 2015 Hi eXo, Und hat dir das Video alles erklärt? Zitieren
yoma Geschrieben 30. April 2015 Geschrieben 30. April 2015 59mm: Okay, dann muß ich mir meine Sollpositionen nochmal nachrechnen, wär ja schön wenn's direkt paßt. Langlöcher: ich versuche mir vorzustellen wie man bei Zusammenbau die Sensorlage einstellt. Die vier Schrauben Motorflansch lockern, und dann bei laufendem(!) Motor das Konstrukt verdrehen bis es paßt - vorausgesetzt man sieht am Leerlaufstrom gut genug das Minimum. Gleichzeitig Drehzahl konstant halten, sonst kein Minimum! Evt. mit Trimmung. Festziehen. Wenn das so geht - gut. Bei mir z.B. ist wg. Riemenscheibe eine Flansch-Schraube ziemlich schlecht erreichbar, ich will das nicht oft tun müssen... yoma Zitieren
barney Geschrieben 30. April 2015 Geschrieben 30. April 2015 59mm: Okay, dann muß ich mir meine Sollpositionen nochmal nachrechnen, wär ja schön wenn's direkt paßt. Langlöcher: ich versuche mir vorzustellen wie man bei Zusammenbau die Sensorlage einstellt. Die vier Schrauben Motorflansch lockern, und dann bei laufendem(!) Motor das Konstrukt verdrehen bis es paßt - vorausgesetzt man sieht am Leerlaufstrom gut genug das Minimum. Gleichzeitig Drehzahl konstant halten, sonst kein Minimum! Evt. mit Trimmung. Festziehen. Drehzahl statisch vorgeben ist mit den BamBam Controller möglich. Damit kann eine Hand freigemacht werden. Wenn das so geht - gut. Bei mir z.B. ist wg. Riemenscheibe eine Flansch-Schraube ziemlich schlecht erreichbar, ich will das nicht oft tun müssen... yoma Vorschläge wie man das besser hinbekommt? Ich habe da keine universelle Idee. Langlöcher könnten helfen, aber nicht bei allen Gehäuseentwürfe, die wir hier hatten. Da müsste das Gehäuse auf die Platine zum Schluss geklippt werden. Damit wären die Leiterplattenkanten geschützt und der Aufbau erleichtert. Also Langlöcher? Zitieren
eXo Geschrieben 30. April 2015 Geschrieben 30. April 2015 Was spricht den für und was dagegen die Langlöcher? Pro: Mehr Flexibilität zum Ausrichten der Sensoren nach der Montage der Halterung. Contra: Wird mal wohl häufiger nach richten müssen. Die Abdeckungen müssten beide angepasst werden. Habe schlecht geschlafen, mir fällt nichts mehr ein. PS: Ja, das Video hat meinen Horizont erweitert. Ist so weil ist so und überhaupt frag jemand anderes. - mache ich auch.. denn ich will das verstehen. Zitieren
barney Geschrieben 30. April 2015 Geschrieben 30. April 2015 (bearbeitet) Hallo Gerald, kannst du mir bitte eine neue Konturdatei generieren, wo die Bohrlöcher durch zwei 3mm Langlöcher ersetzt werden. Die Langlöcher sind Seitlich offen und und gebogen, so wie die untere Kontur. Sieh dir einfach die Bilder des ersten Beitrags an. Bitte keine Bemaßungen oder ähnlich in die Datei packen nur die einfache Kontur und drei kleine Kreise, wo die drei Sensoren hinplaziert werden müssen. Bitte im alten Dateiformat! Hier kannst du die Importfähigkeit testen: Externe Links nur für Mitglieder sichtbar Vielen Dank Barney bearbeitet 30. April 2015 von barney Zitieren
gerald-z Geschrieben 30. April 2015 Geschrieben 30. April 2015 Dein Link geht nicht? Aber ich denke ich habs verstanden was du meinst. Ich bin allerdings gegen die Langlöcher. Warum? Die Platine wird unnötig groß. Das mit dem Einstellen habe ich bereits gelöst. Zwei varianten. 1 externe Befestigung. 2 Die Ringvariante ist noch nicht ganz fertig. Ich hätte auch den Platz nicht dafür. Der Aufwand für das Gehäuse ist auch nicht ohne gewesen. Alles nicht mehr zu gebrauchen. :mad: Hier ein Bild von der Ringvariante. Wie gesagt noch nicht ganz fertig. - Motor muss zur Montage nicht demontiert werden. - Zum einstellen die Klemmschraube am Halter lösen. In die richtige Richtung drehen und wieder festschrauben und fertig. Die beschriebene Klemmschraube und die Kabeldurchführung für den Motor ist derzeit noch nicht vorhanden. (wird gemacht so bald ich Zeit habe) Gruß Gerald 1 Zitieren
barney Geschrieben 30. April 2015 Geschrieben 30. April 2015 Dein Link geht nicht? Aber ich denke ich habs verstanden was du meinst.Ich bin allerdings gegen die Langlöcher. Warum? Die Platine wird unnötig groß. Das mit dem Einstellen habe ich bereits gelöst. Zwei varianten. 1 externe Befestigung. 2 Die Ringvariante ist noch nicht ganz fertig. Ich hätte auch den Platz nicht dafür. Der Aufwand für das Gehäuse ist auch nicht ohne gewesen. Alles nicht mehr zu gebrauchen. :mad: Hier ein Bild von der Ringvariante. Wie gesagt noch nicht ganz fertig. - Motor muss zur Montage nicht demontiert werden. - Zum einstellen die Klemmschraube am Halter lösen. In die richtige Richtung drehen und wieder festschrauben und fertig. Die beschriebene Klemmschraube und die Kabeldurchführung für den Motor ist derzeit noch nicht vorhanden. (wird gemacht so bald ich Zeit habe) Gruß Gerald Ich hätte die Leiterplatte auch nicht vergrößert, sondern nur Schlitze bis zur Seite ausgeführt, aber deine Klemmvariante macht die Schlitze obsolete. Ich würde mir das nur mal gerne in KiCAD ansehen. Nachher lade ich die aktuelle Fassung hoch, damit wir prüfen können, ob ich den Winkel eingehalten habe. Link wurde angepasst. VG Barney Zitieren
gerald-z Geschrieben 30. April 2015 Geschrieben 30. April 2015 Oke ich sehe mir das gleich mal an. Zitieren
gerald-z Geschrieben 30. April 2015 Geschrieben 30. April 2015 Wie man sehen kann Macht das keinen Sin Barney Jeder Schraube hat einen Kopf und die meisten M3 Schrauben haben einen 5,5mm Kopf. Bei der Aktuellen Platine bleiben zwischen Kopf und Platinenende 0.25mm. Das habe ich damals schon auf das Maximum Ausgereizt. Macht man dann noch ein Langloch bis nach außen. Steht der Kopf über die Platine und das ist Pfusch. Mal abgesenen könnte man dann nur 2 Grad verstellen. Mann müsste erst einmal testen ob man die ganzen Bauelemente wirklich benötigt? Wenn man einige weglassen würde, würde das Löten Stressfreier und man könnte die Langlöcher noch etwas nach innen ziehen. Die Grünen Kreise sind jeweils die Schraubenköpfe. Zitieren
gerald-z Geschrieben 30. April 2015 Geschrieben 30. April 2015 Noch eine Version. Wo die Langlöcher nach innen gehen. Auch wenn man Bauteile einsparen kann. Ist das nicht mehr realistisch. Es würde in der Mitte nur ein Steg von 6mm bleibe. Da fällt die Platine ja schon fast auseinander. Angenommen man möchte 15 Grad verstellen. Zitieren

Empfohlene Beiträge
Tritt dem Gespräch bei
Du kannst jetzt posten und dich später registrieren. Wenn du bereits einen Account hast kannst du dich hier anmelden.