barney
-
Gesamte Inhalte
3.658 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
8
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von barney
-
Auftrag erkannt und wird ausgeführt!
-
Kann mir einer sagen ob nun NTC / PTC? Wer solch einen Motor hat, bitte einfach nachmessen und hier das Ergebnis posten.
-
Sicher ist das, das Optimum. Ich messe derzeit die Temperatur des Motors an der Verschraubung zum Motorhalter. Es ist nicht die Wunschstelle, zeigt aber eine Tendenz auf, ob man den Motor grillt. Ich wie mit dem Motorregler. Da messe ich die Temperatur auf dem Kühlkörper, nicht am/im MOSFET. Manchmal muss man Kompromisse eingehen.
-
Jippi, gibt es bei Segor. Jetzt nur noch in Kicad. Was für einen 10k Thermistor ist denn gemeint? NTC oder PTC? Welche Klasse?
-
Einer müsste Temperatur sein!
-
SMD und Heißluftfön würde klappen, aber die Hall-Sensoren müsst du löten. Da ich noch nie eine KiCAD-Leiterplatte in Auftrag gegeben habe, muss ich erstmal sehen, ob ich die richtigen Daten für den Hersteller produzieren kann. Vielleicht schaffe ich es Morgen den Auftrag zu generieren. In 10 Tagen würden dann die Leiterplatten kommen. Die Bauteile für 20 Leiterplatten würde ich auch schon mal holen. Aber nur für 5 Leiterplatten Hallsensoren, da ich nicht weiß, ob diese gut dafür geeignet sind. @Gerald, @Kai: Da ich keinen ESC habe, der Sensoren auswertet, würde ich euch je zwei Leiterplatten zusenden. Wenn ihr sagt, das passt, können wir weitermachen.
-
Gratuliere. Schwein gehabt.
-
Hallo St1ft, willkommen im Forum. Ich mache es mal stichpunktartig: * Ich habe keine Leiterplatten mehr übrig. * Die aktuelle Platine ist im Wiki zum runterladen. * Ich habe bis jetzt im Fischer Leiterplattenservice in Anspruch genommen. Die Qualität ist super, der Preis auch. Die Bohrungen sind nicht wie bei vielen günstigen China Produzenten irgendwo. * Die aktuelle Leiterplatte wurde mit KiCAD entworfen, da habe ich mit Fischer noch keine Erfahrung. * Dir ist es freigestellt, die Leiterplatte fertigen zu lassen. 5 Stück sind der unterste Auftragswert. * Die Bauteilquellen stehen im Wiki. * Frag doch mal rum wer noch eine haben will. VG Barney
-
Preis: 30 Stück ohne Bauteile und MwSt. ca. €50,- mit Bestückungsdruck. Ohne Druck €40,- 10 AT 5AT €80,- Bitte nicht festnageln. Ungefährer Preis. Bauteile ohne Porto: 3 x Sensoren je €1,- 1 x 1uF je €0,065 3 x 100nF je €0,05 3 x 680pF je €0,05 3 x 10kOhm je €0,04 Sollte bezahlbar sein.
-
So soll es sein. Rettich.

-
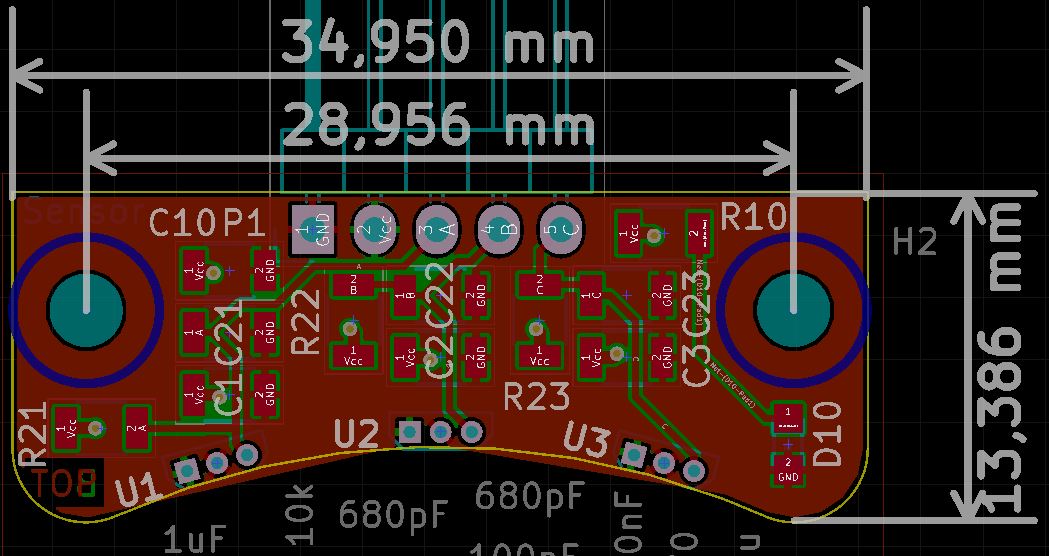
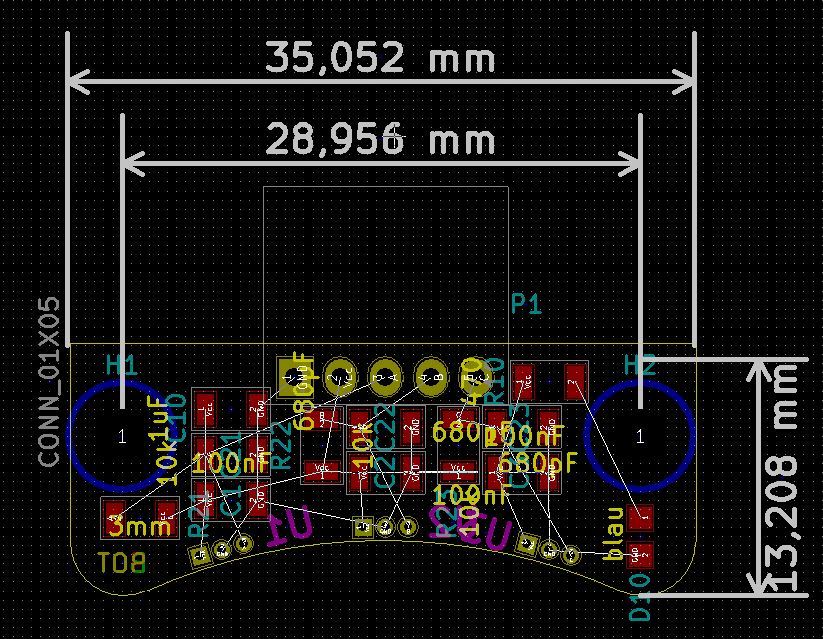
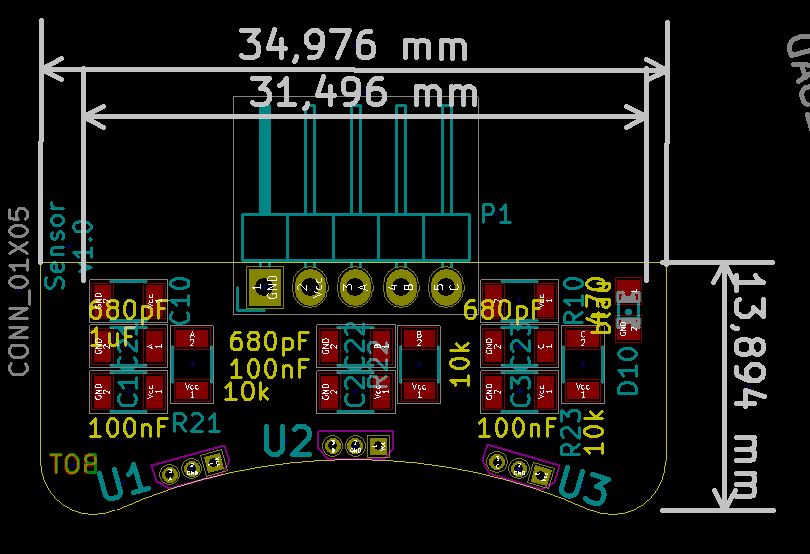
Kleiner gehts wirklich nicht. Mal dir das mal auf ein Stück Papier auf! 13.2mm hoch, an der dicksten Stelle. Es handelt sich um eine Leiterplatte.
-
Eiszapfen im Gesicht und die Erkenntnis, dass die Programmierung "Umschaltung" zwischen Direct Drive und Integral Drive eine zeitliche Komponente bekommen muss. Habe es geschafft zwischen den Modis währen der Fahrt ausersehen umzuschalten. Es sieht nicht elegant aus, wenn man plötzlich Direct Drive an hat und man nur sachte einbeschleunigen wollte. :devil: Die Umschaltung sollte in einem Zeitfenster von zwei Sekunden erfolgen. Wer dann nicht vollständig alle Umschaltbefehle gesendet hat, muss erneut innerhalb von zwei Sekunden versuchen. Alle alten Befehle werden dann verworfen.
-
Der Einstieg für die Geschwindigkeit und Reichweite steht im Wiki. Als Motor hat sich der C6354 rausgestellt. Damit geht kick push. Bremsen geht mit einigen Controllern mit dem Motor. Ü40 ist nicht zu empfehlen. Sieh mal im Verletzungsbereich nach. Selber mit 33 Km/h unterwegs und zufrieden. Rest folgt... VG Barney
-
Ich dachte die untere Tasche ist die Aufnahme der Platine? Ich habs jetzt geschnallt wie rum! Ich zeichne es nachher mit deinen Maßen. Sollte klappen. Denke an den Kabelauslass für die Sensorleitung.
-
An die Freunde der nahtlosen Bandbreitenadaption. Bitte keine Konstrukte, die nicht jeder "Depp" ohne äußere Hilfe und Chemie-Kenntnisse nachbauen kann. Ich möchte einen simplen Aufbau, den man auf den Motor steckt, ausrichtet und nie wieder auffällig wird. Einen Motorring nehme ich sofort. Eine kleine Leiterplatte mit deterministischen Verhalten auch. Da ich meiner Meinung nach genügend Informationen zusammen habe, werde ich die Leiterplatte mit den Pull-Up Widerständen und den Filter-Kondensatoren weiterführen. Vielleicht mache ich auch noch eine Debugging Platine. Mal sehen was der Leiterplattenhersteller dazu sagt. Wir sind bald bei 20 Platinen. Das macht mir sorgen. Ich weiß nicht, ob ich den richtigen Sensor rausgesucht habe und eine Probecharge habe ich auch noch nicht gemacht. Hat einer von euch die Möglichkeit den Mechanisches Muster auf einer Leiterplattenfräse anfertigen zu lassen, um die Maße zu bestätigen, besonders den Winkel von 17.14°. Wir sollten hier jetzt einen Redaktionsschluss setzen, wie bei einer Diplomarbeit, sonst kommen wir nicht zum Ende. Bis hier 86 Beiträge! VG Barney
-
Innenwiderstand messen nach der Ausfahrt. Und nicht komplett leer fahren. Ich traue der Sache noch nicht.
-
Klemmring ist gebongt. Die Größe der Platine sollte nicht weiter schrumpfen.
-
Ist die letzte Skizze nun die Arbeitsgrundlage? Oder doch Pullups und Filterkondensatoren?
-
Noch weniger, ist nicht mehr da! Edit: Gerald, wie würdest du den Halter ungefähr bauen? Grobe Vorstellung?
-
Filterkondensatoren und Pullups sollten im Controller normalerweise stecken. Ich lasse diese auch noch weg. Als Variante. Die Steckleiste muss auch nicht angebracht werden, da kann man auch seine Drähte direkt anlöten.
-
Jetzt kann ich nur noch die Pullups und die Filterkondensatoren streichen! Edit: Malt euch das bitte vorher mal auf Papier auf, wie groß das wird!
-
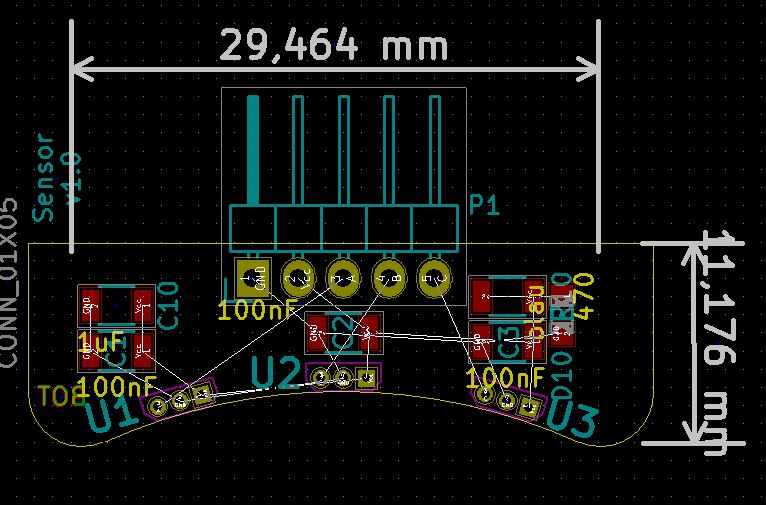
Heul! o.k. ich mache jetzt mal eine Variante, die keine LEDs hat (bis auf Vcc). Diese wird kompakt sein. Die Platine steht zum Motor. Liegend müsste sie sich der Krümmung des Motors anschmiegen. @Trampa: Im Prinzip benötigt man keine Platine. Ich habe reine 3D Drucklösungen gesehen. Man muss nur die 17.14° sauber hin bekommen und dicht an den Magneten sein. Da bin ich wieder fast dabei, die Sensoren in der Wicklung einzuarbeiten Es ging hierum, nachträglich und ohne öffnen des Motors, Sensoren nachzurüsten, die man auch noch einstellen kann. Die LEDs sollten Fehlerfälle aufzeigen und bei der Justage helfen. Ja klar, kann man eine zweite Platine zum Debugging andocken, müsste hat nur als Multinutzen in Auftrag gegeben werden. Den Schaltplan habe ich ja schon gezeichnet. Sagt mir nur, worauf es hinauslaufen soll. Ich zeichne nachher die Sparvariante.
-
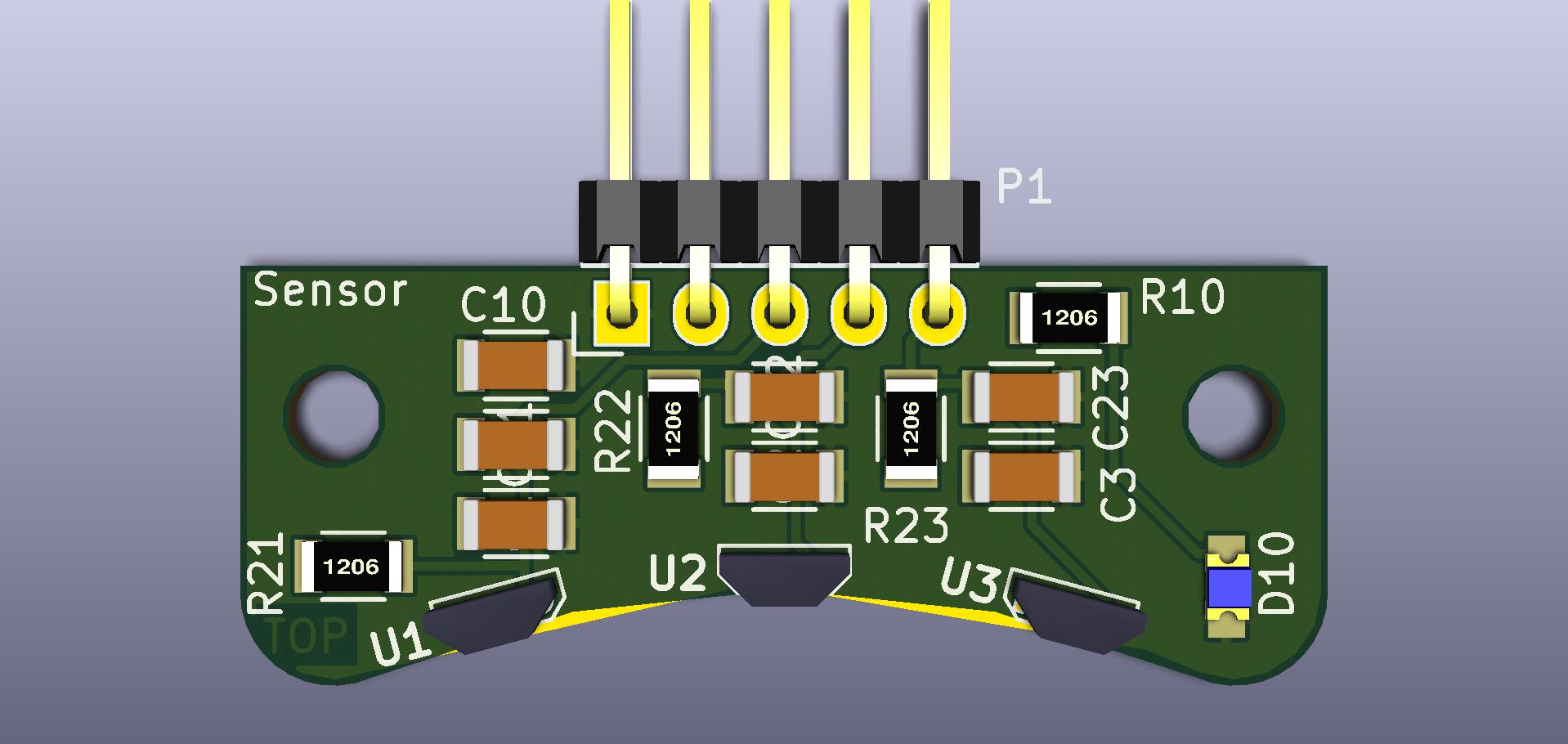
Hi Kai, Hi Gerald, wir müssen uns nur einigen, was und wie. Das Probelayout kostet mich ca. 4 Stunden. Auch wenn man es nicht der Sache ansieht! Wie soll denn das Ganze nun aussehen? Ich würde auf den Schalter verzichten und die LEDs von mir aus als 3mm Durchstecktechnik ausführen. Dann kann jeder die LEDs dort hinführen, wo er will. Die müssen auch nicht bestückt werden. Mindestbestückung ist 3 Hall-Sensoren und 4 Kondensatoren. Ich kann die Hall-Sensoren auf die Bestückungsseite zurückholen, damit die Bauteilseite im Gehäuse landet. Ich muss nur wissen, was benötigt wird!
-
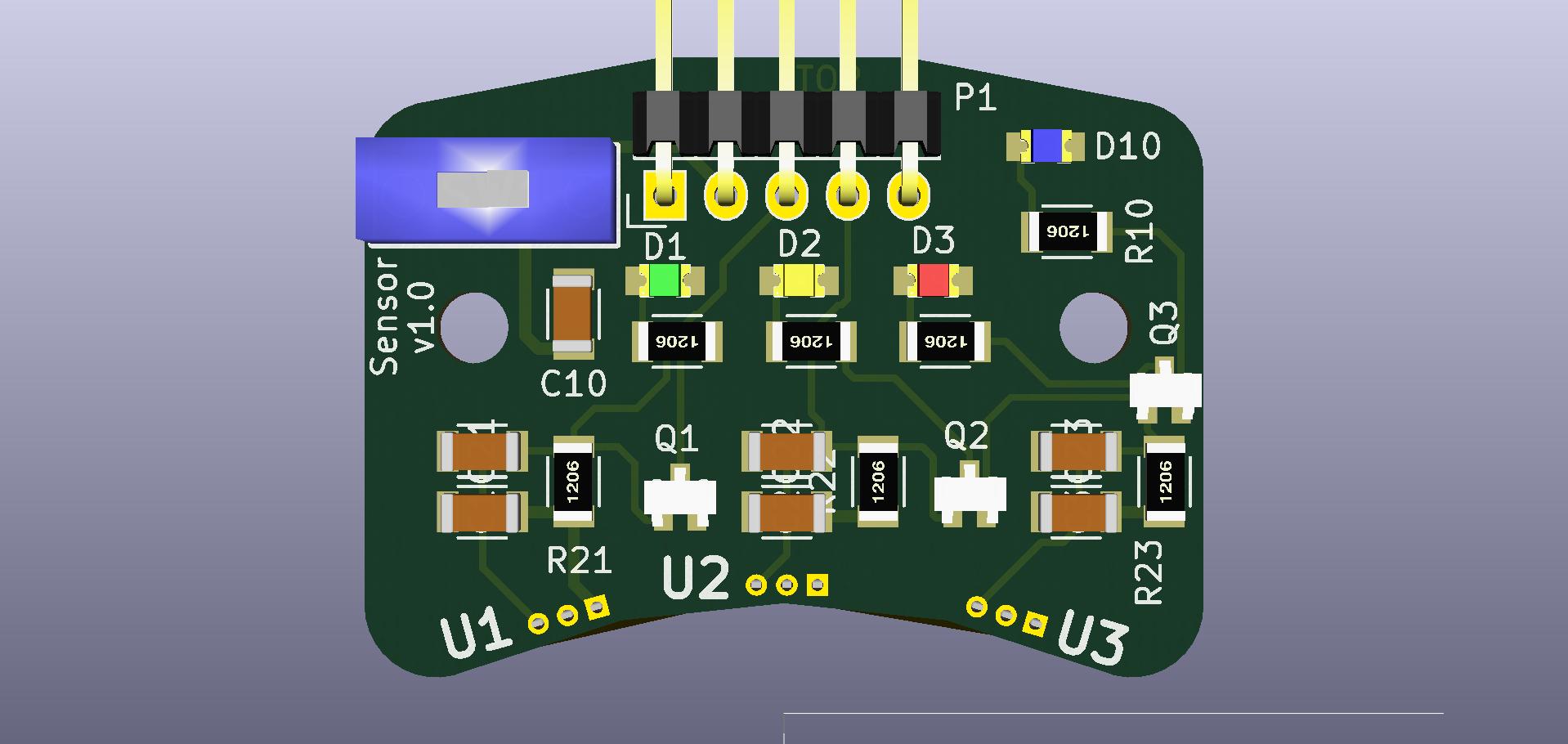
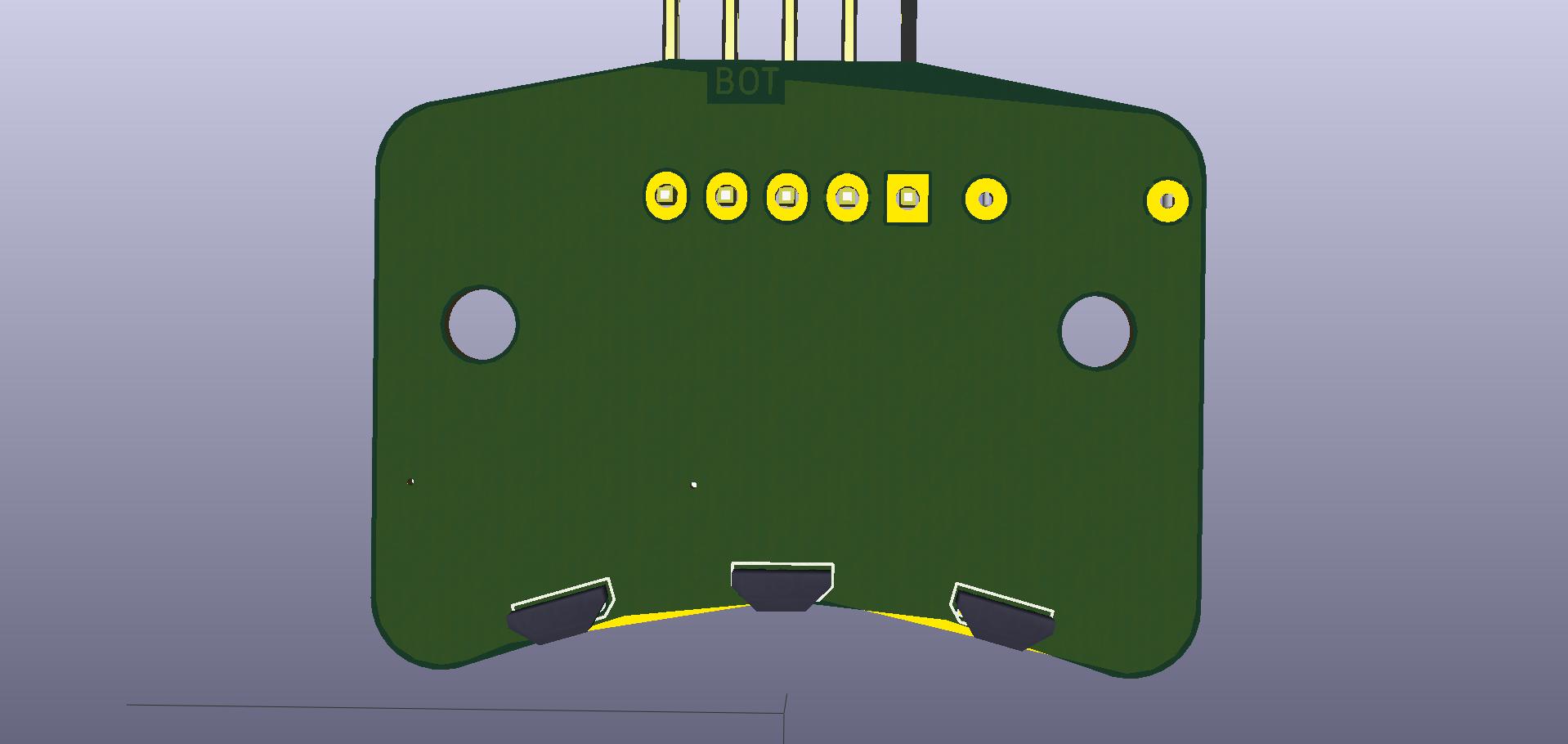
Ich bin mit der LED-Abschaltung nicht besonders glücklich. Das Layout wird dadurch recht ungünstig im Signalverlauf. Wenn es geht würde ich gerne darauf verzichten. Hier mal die Ansicht vorne und hinten mit den Sensoren.
-
So habe ich auch gedacht und dann wird mir 17.14° Vorgerechnet. Edit: Wenn ich mir die Anker ansehe, dann ist mir das alles klar. Man sieht das (den) vorbeikommenden Magnet und hat dann mit einen gewissen Phasenwinkel die Information für die nächste Kommutierung. Das aufgrund der Wicklungen bestimmt Bereiche übersprungen werden müssen, ist auch klar. Damit können wir die Innensicht abschließen! Wenn dann die Sensoren außen angebracht werden, zählt doch die Anzahl der Magnete. Hier ist plötzlich 17.14° angesagt. Ich bekomme das derzeit nicht intuitiv in den Schädel. Ich werde darüber nochmal intensiv nachdenken. Zumal wenn im Erklärungstext was von 120° oder 60° Controllern steht. Ich scheine hier auf dem Schlauch zu stehen. Aber ich muss mir auch mal die Zeit dafür nehmen....