barney
-
Gesamte Inhalte
3.658 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
8
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von barney
-
Eine Anpassung ist für diese Charge nicht mehr möglich. Ich habe am Freitag den Auftrag für die Leiterplatte hochgeladen.
-
Vielen Dank für das Stecker Angebot, ich nehme Kontakt zu dir auf. @Kai Oszi: ich habe mir ein 2/16 Kanal analog/digital Oszi für USB zugelegt. Chinaware halt. Keinen Trigger Eingang (kauf kein Oszi ohne). Digital ist auch nicht wirklich gelungen. Aber ohne Oszi ist Arbeiten kaum möglich.
-
Dafür scheinen meine Zelle in Rente gehen zu wollen. Heul.
-
Wenn du Anti Spark gelesen hast, müsstest du erkennen, das man damit schaltet kann. Damit ist denn deine Frage mir nicht ganz klar.
-
Darf ich dir noch einen Tipp geben. Schalte mal das Raster auf 1mil oder feiner, dann kannst du besser messen.
-
Schalt vorher auf den user1 oder user2 layer und dann kannst du das Lineal rechts nutzen.
-
Ich bin nicht am Rechner. Am besten kicad runterladen und die Datei aus den Wiki nehmen.
-
http://www.elektro-skateboard.de/wiki/eigenbauten/powerswitch-mit-antispark
-
63 hätte ich gesagt. Was der Unterschied ist bei den 63mm Varianten?
-
Kannst du denn viele Kunststoffgehäuse fräsen? So 30 Stück?
-
Siehe dir den Beitrag eins an und besuche die Webseite des Herstellers. Dort ist unten die Datei zum Runterladen. Ich habe die Bohrungen woanders!
-
Es gibt eine stl-Datei, die für einen 63 Motor passt. Die Bohrungen müssten versetzt werden. Es gibt doch sicher hier Künstler, die sowas können.
-
Bezeichnung drv5013. Warum diese, sehr kleine Hysterese. Warum nicht xy, bis dahin hättest du 140 Beiträge lang was dazu sagen können. Ich habe 4 Vorschläge bekommen und mich für dieses robuste Modell entschieden. Die Löcher können leicht aufgedremelt werden. Nimm doch nachher nur die Leiterplatte. Ist ja open source.
-
Die Versandkosten von Distributor sind nicht ohne! €20,- Ich habe zum Testen 18 Sensoren der empfindlichsten Klasse genommen und jeweils drei der nächsten zwei Klassen. ca. €48,-. Gut hier lohnt sich nur die Massenabnahme.
-
Da frag mal Gerald-z.
-
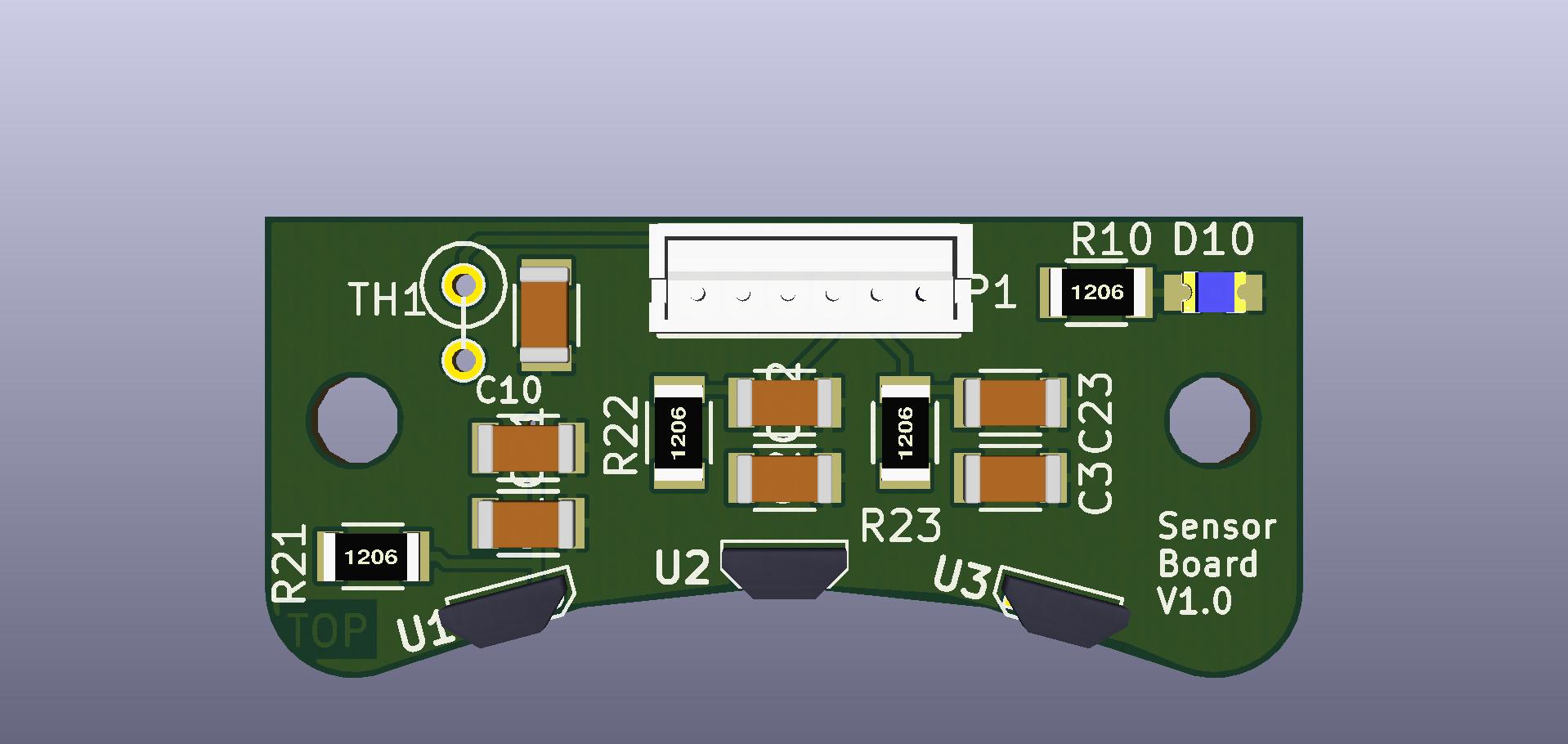
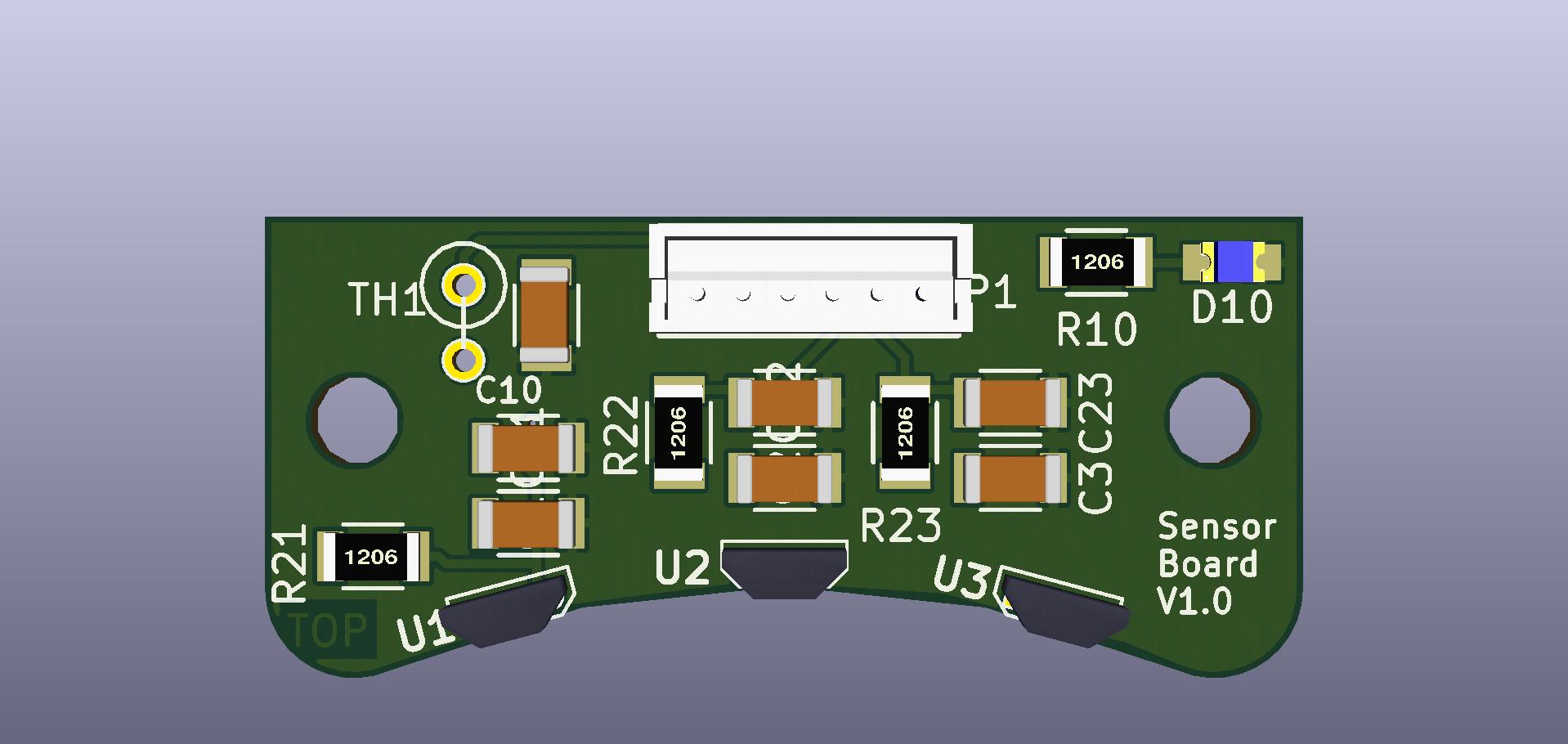
Hallo Kai, Hallo yoma und alle anderen Beteiligten, ich habe gerade den Auftrag für 10AT losgesendet. Da ich noch nie KiCAD Daten zur Verarbeitung gegeben habe, hier also den Gerber-Standard, bin ich auf die Reaktion des Leiterplattenherstellers gespannt. Es werden voraussichtlich 30 Stück werden. Wie geht es Weiter? Kai und Yoma, ich würde vorschlagen, dass wir zu dritt die Leiterplatte testen. Ich würde für 6 Leiterplatten Sensoren und Buchsen, aber für 30 die restlichen Bauteile kaufen. Jeder von uns bekommt zwei Leiterplatten zum Testen. Da ich keinen ESC habe, der Sensoren auswertet, sehe ich mir das nur am Oszi an. Solltet ihr bestätigen, dass ist es, dann hole ich mehr Hall-Sensoren. Damit alles in einen gepolsterten Briefumschlag passt, wird nichts gelötet, das macht ihr alles selber! Ich hoffe, dass es keine Probleme mit dem Layout gibt und die 17.14° wirklich bei der Positionierung erreicht wurde. Die Hall-Sensoren können leicht schräg gelötet werden. Drückt mir die Daumen!
-
Ich wollte 35 Stück beauftragen. Aber nicht 150 Hall-Sensoren, wo ich weiß ob die passen....
-
Wie fange ich an: Bidirektionale Hall-Sensoren: DRV5013 Sieh dir mal Seite 10 im Datenblatt an. Die unterscheiden schon zwischen N/S. Norden ist low und Süden ist high, wenn man das Latch mal weg lässt. Wichtig ist es die Flanke auszuwerten. Also, ob der Hall ein rise oder fall meldet. Also nur ein Flanken fall oder rise Impuls pro N. Flanken und IRQs machen sich immer gut. Bei den Rest kann ich dir nicht mehr folgen. Da benötige ich eine Flasche Rotwein. Den vertrage ich aber nicht. Also lasse ich es. VG Barney
-
Hallo Beatbuzzer, nicht ganz, hier ist ein kleiner Gedankenfehler. Es geht noch nicht um den Vorwinkel. Ich habe das Modell dahin vereinfacht, das der Hall-Sensor schaltet, wenn der Magnet exakt über den Pol steht. Also A-Hall schaltet, wenn N über 0° A-Pol steht. Der nächste N-Magnet steht 17,14° vor dem B-Pol, also auch die 17.14°, die der B-Hall-Sensor nach dem A-Hall steht. Heißt also, wenn der Motor 17.14° weiter dreht, steht ein N-Magnet über den B-Pol und ein N-Magnet am B-Hall, der dann sein Schalt Signal geben wird. C ist analog anzusehen. Jetzt kann man dieses A-B-C-Hallsensor Konstrukt entsprechend der Motoranforderung um einen Vorwinkel X verdrehen. Wenn man dann mit einer Strommesszange dann das Minimum findet, ist alles richtig eingestellt. VG Barney
-
Und kann jetzt die Leiterplatte in Auftrag gegeben werden? Und sind jetzt alle Wünsche integriert?
-
Jetzt ist der Knoten geplatzt. Wenn man sich die drei Statoren aufzeichnet und die Magnete (14) als 7 Pole (nur N) zeichnet, fällt es wie Schuppen von den Augen. Ich versuche es mal ordentlich zu zeichnen. Auf jeden Fall auf die Schnelle: 360/7 Pole = 51.42° / 3 Sensoren = 17.14° Beim Zeichnen hat man Statoren bei 0° (A), 120° (B), 240° ©. Wenn ein Magnet (N) bei 0° (A) steht, steht der nächste Magnet bei 51.42° und der übernächste bei 102.86° - also 17.14° vor dem 120° Stator B! Wenn man das Spiel weiter treibt, N x 51.42°, N=4 -> 205,71° - also 34.28° vor dem 240° Stator C! Damit ist mein Weltbild gerettet. VG Barney Edit vor und für im Text vertauscht! Nur ein Schreibfehler!
-
Passt es so besser? Anbei der Schaltplan. Kann gerne gesichtet werden! BamBam-Sensor-holder-minimal.pdf

-
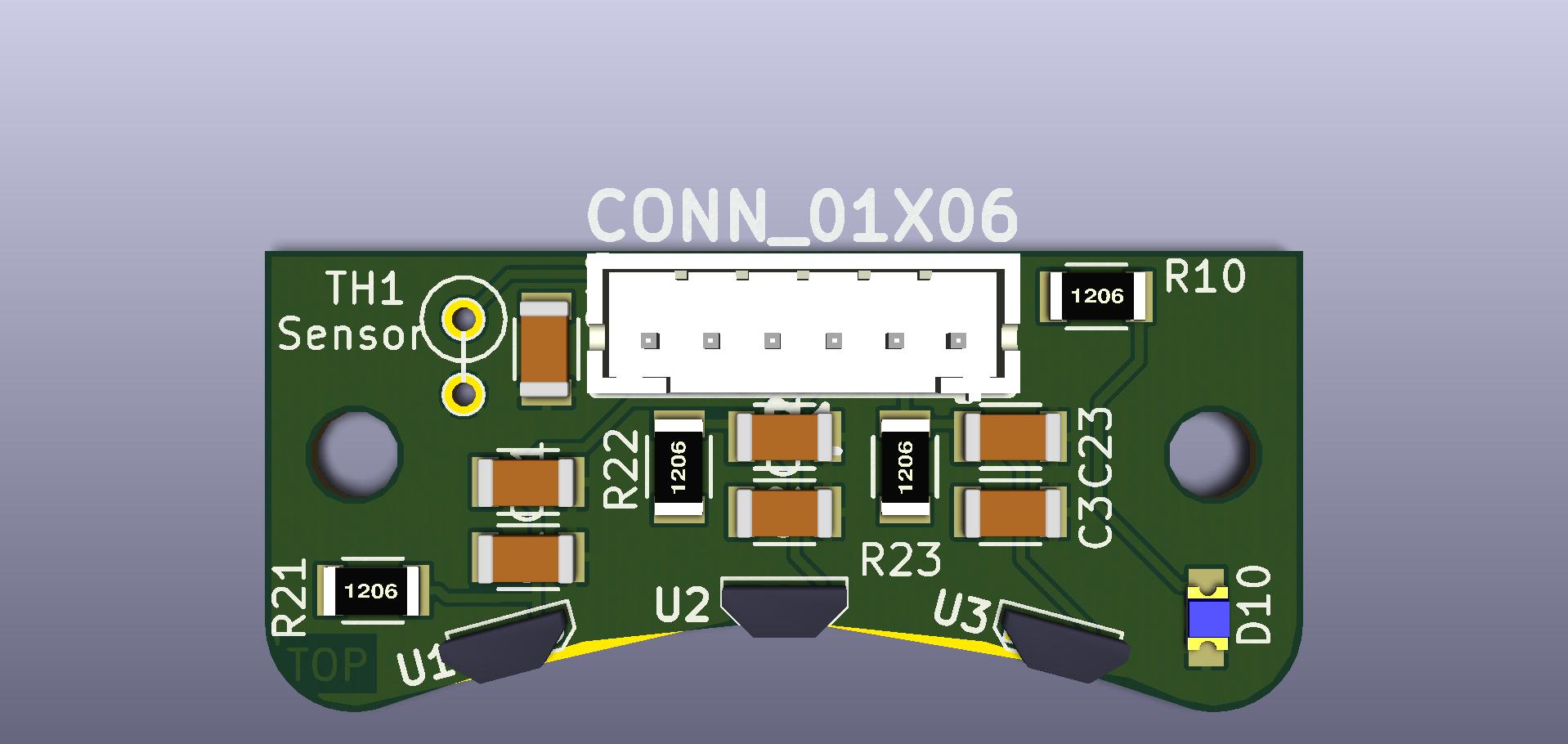
Und Stimmt, es sind 1,5mm. Natürlich gab es dafür keine Lib. Also selber zeichnen. Und das Layoout musste stark verändert werden, da keine Leiterbahnen zwischen den Pins passten. So, ist dass jetzt so, wie es benötigt wird?
-
Mist, nicht 2,5mm? stelle gerade fest, es gibt 1.5mm, 2mmm und 2.54mm! Wie war deine Bestellnummer? Edit: Laut der Rules, 1.5mm. muss nochmal neu zeichnen.
-
15,5mm hoch. Die Buchse ist nicht 100% gleich. Wer solch eine Buchse hat, bitte prüfen, ob die Größe passt!