barney
-
Gesamte Inhalte
3.658 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
8
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von barney
-
Verstanden, du benötigst keine Füßchen, da die Rückseite der Leiterplatte komplett auf den Halter aufliegen kann. In Berücksichtigung von Gerlad-Z, der die Steckerleiste auf die Rückseite löten möchte (was in der Kabelführung auch Sinn macht) hast du die gesamte Fläche der Leiterplattenrückseite als Auflage zur Verfügung. Eine Hülle könnte dann drüber geschoben werden, da lasse ich deiner Fantasie freien Lauf. VG Barney
-
OK. Dann lasse ich die Seitenschlitze weg, kommt mir entgegen. Die Bohrungen habe ich auf 3.2mm vergrößert. Eins ist mir noch nicht klar. Was meinst du mit Mehr Fleisch auf den Knochen. Die Schraube scheint perfekt zu sitzen. Was soll ich anpassen?
-
Jup beides
-
Die Buchse kannst du auch auf die andere Seite löten. Du musst nur daran denken die Buchse umzudrehen!
-
Wenn du das Sensor-Board näher zum Mittelpunkt ran ziehst, vergrößert sich der Winkel in Relation zum Motor. Ob 64mm oder 63mm sogar 59mm sollten sich in Grenzen halten. Da ich 0.6° verpeilt habe, passt der Winkel wunderbar zum 59mm Motor.
-
Ich habe auf die Schnelle keine Preise gefunden. Wollte sagen, bitte anfragen.
-
Sieh dir die Software an, dann hast du keine Zweifel mehr. Die wollen nur im Zweierpack ESC verkaufen.
-
Jenso möchte derzeit €275,-
-
Da das der Hersteller der Englischen ESC ist, kann man davon ausgehen. Wobei sie mit einer neuen Variante für Skateboards werben. Ich lese aber nirgends was von Sensoreingängen.
-
OK. Wie ich schon geschrieben habe, sieht auf dem Foto groß aus. Für den SK3 würde ich keine neue Platine machen, da können die Sensoren leicht angewinkelt eingelötet werden. Derzeit habe ich einen Winkelfehler von 0.6°. Die aktuelle KiCAD Version lässt jetzt eine Winkelmessung zu. Damit kann ich die Sensoren präzise platzieren. Rechne mal den Unterschied zwischen einen 63mm und einen 59mm Motor im Winkel um. Das dürfte kaum eine Rolle spielen. Was Strommesstechnisch natürlich zu beweisen wäre. Seitlicher Ausschnitt dürfte kein Problem sein. Derzeit liegen bei mir aber 30 Leiterplatten, die nicht finanziert sind, und die ich nicht wegwerfen möchte. Die nächste Charge bekommt einen Seitenausschnitt. Ich bin auf das Steuerungsergebnis gespannt. Hast du einen ESC mit Sensoranschluss? VG Barney
-
Stromzange AC/DC und gerade DC ist wichtig: http://www.conrad.de/ce/de/product/1307544/Hand-Multimeter-Stromzange-digital-VOLTCRAFT-VC-330-CAT-II-600-V-CAT-III-300-V-Anzeige-Counts-2000?ref=searchDetail oder hier: http://www.pinsonne-elektronik.de/pi11/index.html ca. €40,- Kann True RMS: http://www.pinsonne-elektronik.de/pi11/pd98.html Hier werde ich selber zuschlagen: http://www.pinsonne-elektronik.de/pi11/pd157_ut210e.html 2.000 A Auflösung 1 mA 20.00A Auflösung 0,01A 100.0A Auflösung 0,1A
-
Verdammt, ich habe daran gar nicht gedacht und im Postamt darauf hingewiesen. Die haben nur Porto für DE draufgeklebt. Glück gehabt, dass es trotzdem ausgeliefert worden ist.
-
Hi eXo, sieht schon mal sehr gut Aus kannst du den Abstand zwischen den Sensoren Köpfen auf 1 bis 2mm verringern? Das sieht auf dem Foto sehr groß aus und könnte zum Jittern des Hall-Signals führen.
-
Jetzt erst? Da war die Lieferung in die Schweiz schneller!
-
Schande, ich bin gestern von zwei angehenden Programmieren zu der Polynom Thematik ausgelacht worden. Das wären wohl die Anforderungen im Grundstudium Informatik und zum Lösen eines Polynoms 3 Ordnung benötigt man nur ein Blatt Papier und ein Bleistift oder 10 Zeilen C-Code. :mad: Heul Und dann kam noch so was despektierliches wie "Wenn der Hardware Entwickler (wieder mal) Mist gebaut hat, muss der Programmierer den Pfusch ausgleichen."
-
Hi eXo, die Haltebeinchen müssen nur so lang sein, dass die Köpfe der Hall-Sensoren über die Magnete des Motor stehen. Die Müssen nicht in der Mitte des Motors sein. Ich hätte die Befürchtung, dass die Leiterplatte schwingt und die Hall-Sensoren auf dem Motor aufsetzen. Beim Probieren der Leiterplatte ist mir das passiert und jetzt fehlt die Beschriftung auf den Sensoren. Rotationswinkel der Leiterplatte zur Motorachse: Die Langlöcher auf der ursprünglichen Leiterplatte hatten den Zwecke, dass man die Leiterplatte im Rotationswinkel zum Motor verdrehen kann, damit der ESC zum richtigen Zeitpunkt die elektronische Kommutierung durchführen kann. Im Idealfall prüft man mittels einer Strommesszange den Motorstrom und sucht das Minimum durch verdrehen des Kommutierungswinkel (Zeitpunkt). VG Barney
-
Meinst du den Toshiba Sigma ESC? Der liegt in Einzelteile im Bastelkorb ESC und wartet auf die Leistungsstufe.
-
Bingo! Jetzt benötigen wir nur noch den DE Preis.
-
Ich wollte dir sagen, das die Hall-Sensoren Platine ausrichtbar im Winkel zum Motor sein muss. Mehr nicht.
-
Ich vermute schon, das die Abweichungen bei uns allen gleich sind. Eine Kombination aus Austausch der Widerstände und Einführung des Polynoms wird der Ansatz sein. Ich werde einfach eine Excel Tabelle für 10 Messwerte zur Verfügung stellen und jeder kann sich dann das Polynom 3 Grades generieren und Koeffizienten abschreiben. Das sollte kein Drama sein. Wer das nicht möchte, kann mit meinen default Werten leben. Der BamBam Controller ist auch kein Messinstrument. Der Controller soll nicht völlig daneben liegen, aber 20mV sind hinnehmbar. Wiki Eintrag mache ich in den nächsten Tagen. VG Barney
-
Hat ein Moment gedauert. Die Hall-Sensoren müssen ausgerichtet werden können. Die kannst du nicht irgendwo statisch festnageln.
-
http://www.fliermodel.com/en/products.asp?page_no=1&bigclass=&smallclass= Kennt jemand diesen Hersteller. Die kommen mir so bekannt vor? http://www.fliermodel.com/en/prc-show.asp?id=680 Die Werben sogar, dass sie ESC für E-Skateboards machen.
-
Plopp -> geistige Implosion!
-
OK! Welche Erkenntnis ziehen wir daraus? Lassen wir die Widerstände so wie sie sind und benutzen ein Polynom 3 Ordnung? 10 Werte messen und in einer Tabelle eintragen sollte nicht die Schwierigkeit sein. Mit Libre Office oder Scilab kann man das Polynom bestimmen und die Werte in das Programm eintragen. Die Rechenzeit sollte sich in Grenzen halten. Jetzt ist nur noch die Formel in die Software als Funktion einbringen! Mehr machts? Die Schweizer? VG Barney Edit: Und nächste Woche gibt es wieder eine Folge "Spaß mit Scilab"
-
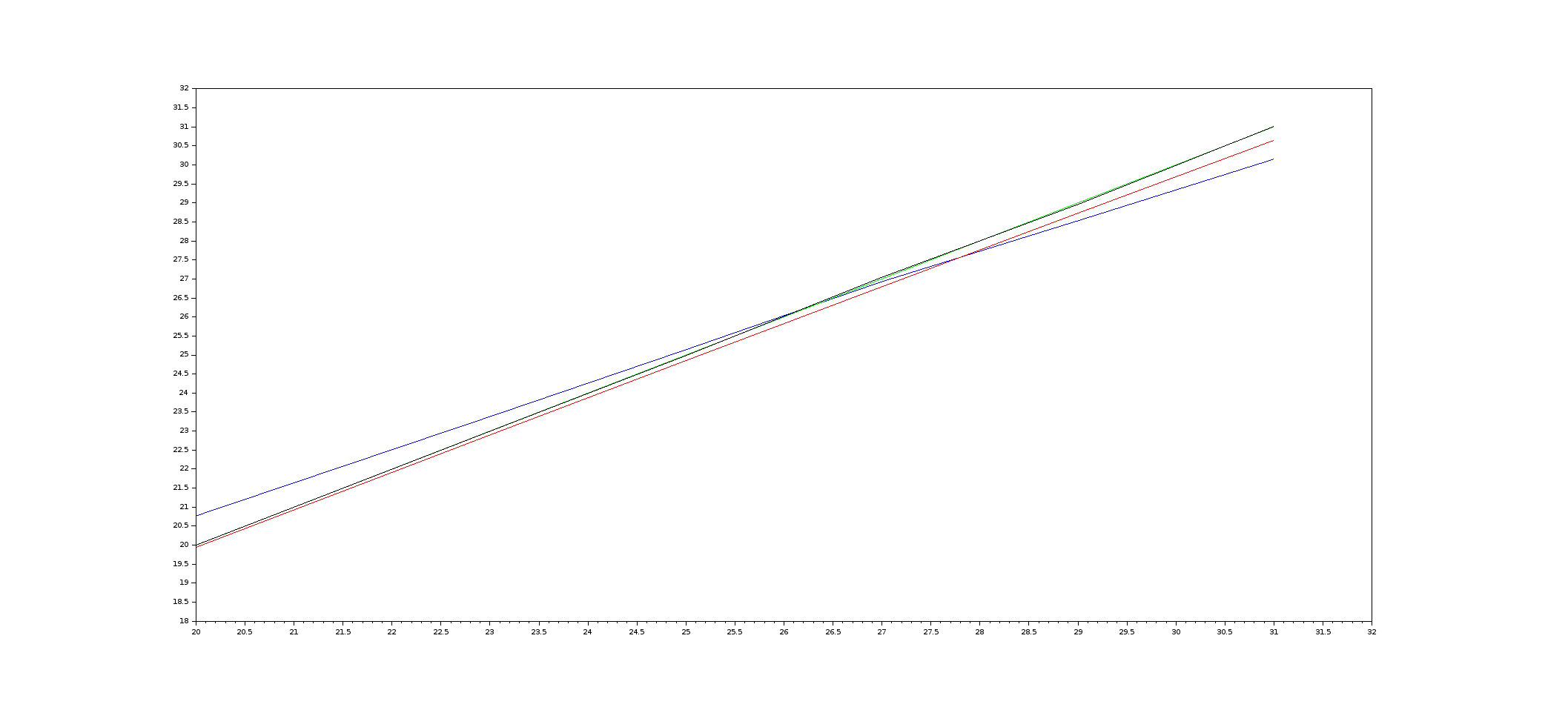
Kann ich dir nicht sagen, was da los ist. Ich habe jetzt Polynome bis zur 5 Ordnung mit den Werten verglichen. Die Grafen sind mehr die Freude eines Einzelnen. Grün = so sollte der Verlauf sein Schwarz = Poly 3 Ordnung Rot = Poly 6 Ordnung Blau = so misst der Teensy Ergo Lineare Interpolation oder das Polynom dritten Grades fittet am besten. :peace: