barney
-
Gesamte Inhalte
3.658 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
8
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von barney
-
Hat einer eine Open Source Trampa Halterung? Benötige ich dringend. Für c6374 Motor und Kettenantrieb.
-
Es müsste hier ein FreeCAD File mit einer Motorhalterung von mir geben. Einfach suchen und Open Source, kein Diebstahl!
-
Pusten ist kein Witz, wie der dabei entstehende Rekristalisationsbruch!
-
Ist das Zeichen für GND.
-

außenläufer umbauen -> nur Glocke drehend
barney antwortete auf Flowhow's Thema in: Elektro-Skateboard Werkstatt
Leistung für das normale Fahren: ist im Wiki Strom Spannung Reichweite. -
Interessant finde ich, wie er den Funkabriss für den Nunchuk erkennt. Kommt mir bekannt vor.
-
Boardtyp: Street Version der Leiterplatte: 08/2014 Version der Software Datum: Immer die aktuelle Version von mir Spannungsbereich des Akkus in S: 8 (LiPoFe) Maximaler Strom: 50A (Sicherung) Leistung des Akkus: 240W HV-Regler (1) Sonderfunktionen: Licht () Hupe () Bremslicht () Blinker R/L () Spannungsmessung (X) Strommessung (X) Modifikation gemäß Wiki Bluetooth-Übertragung (X) Bremsservo ()
-
Ich fühle mich da zeitlich stark überfordert. Ich mache Leiterplatten nur nebenbei. Ich möchte jetzt mit der Spannungsmessung 12S und den ESC ein Multinutzen einsetzen um die Kosten zu drücken. Das zieht natürlich die Zeitdauer für die Projekte in die Länge. Hier würde ich mehr Unterstützung benötigen. Das Sensor Projekt als Gemeinschaftsarbeit und deine Programmierung des BamBam Controllers geht da in die richtige Richtung. Solch eine gelungene Zusammenarbeiten würde ich in anderen Bereichen deutlich begrüßen. z.B. den "Community Trampa Motorhalter" zum SK-Preis hätte da einen gewissen Reiz. Viele Grüße Barney Helden: Neigen oft zur Selbstaufgabe, um die Gemeinschaft zu retten. Ich möchte aber noch eine Weile am Leben bleiben.
-
Das ist ungefähr so nett, wie die VW Kulanz. Wenn er eine fragwürdige Verarbeitung geliefert hat, sehe ich ihn eher in der Pflicht, als das es eine nette Geste ist. Bei dieser Summe sowieso.
-
Wie lange habe die APS ESC bei dir überlebt? Wie war dein Anwendungsfall? Wie verbaut? Wie sind die gestorben? Mit einem Knall oder leise? Sind die anderen ESC schon assembliert und getestet?
-
Diesen Gedanken hatte ich auch schon vor einige Wochen, gepaart mit einer Verwendungs- und Versionsabfrage: Boardtyp: Street Version der Leiterplatte: v3.71 Version der Software Datum: Spannungsbereich des Akkus in S: Maximaler Strom: HV-Regler (1/2) Sonderfunktionen: Licht (X) Hupe Bremslicht Blinker R/L Spannungsmessung Strommessung Bluetooth-Übertragung Bremsservo Irgendwas habe ich Vergessen, ich weiß nur nicht was.
-
Die werden mit großer Sicherheit zu Motorenherstellern mutieren. :devil: Was auch nicht schlecht wäre.
-
Polynom: Hast du die Koeffizienten für das Polynom neu bestimmt?. Wenn du andere Widerstände verwendest und damit den Messbereich veränderst, musst du natürlich die Spannungskurve, mit 5-6 Messpunkten über den gesamten Messbereich, neu aufnehmen und die Koeffizienten bestimmen. Dafür sind die zwei Methoden hier beschrieben worden, um mit Scilab oder Libre Office dies zu tun. Kurzschluss: Jetzt weißt du, warum die Projektreihe BamBam heißt. Warte ab, bis ich mit dem Toshiba Sigma ESC die ersten MOSFETs gekillt habe. Da ist noch ganz viel BamBam drin. Oder Bum? Viele Grüße Barney
-
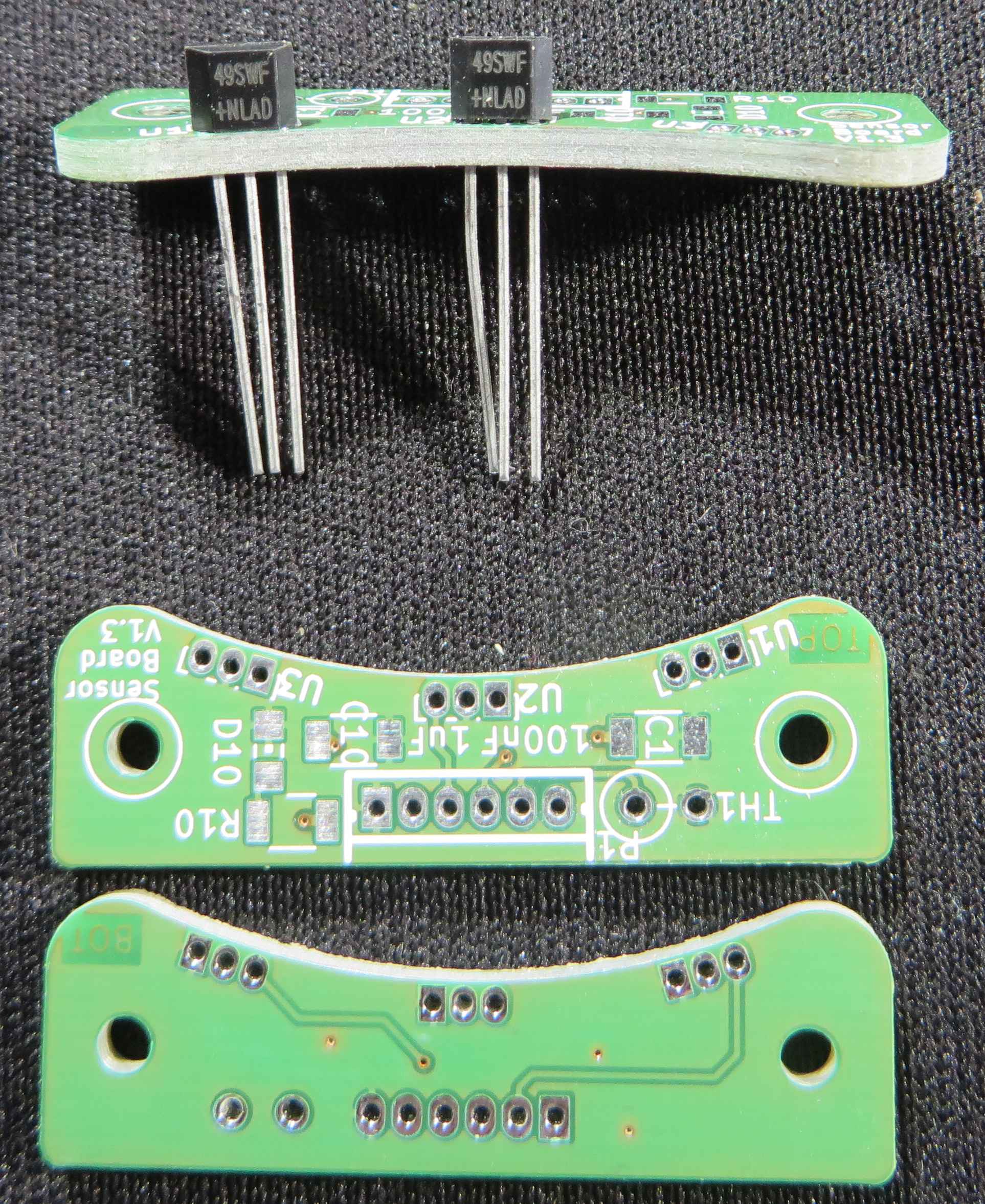
Was ist denn eine Handvoll? Ich nehme das gerne wörtlich. Deine Abdeckung wegwerfen? Warum denn? Weil die Sensoren jetzt plan auf der Platine liegen?
-
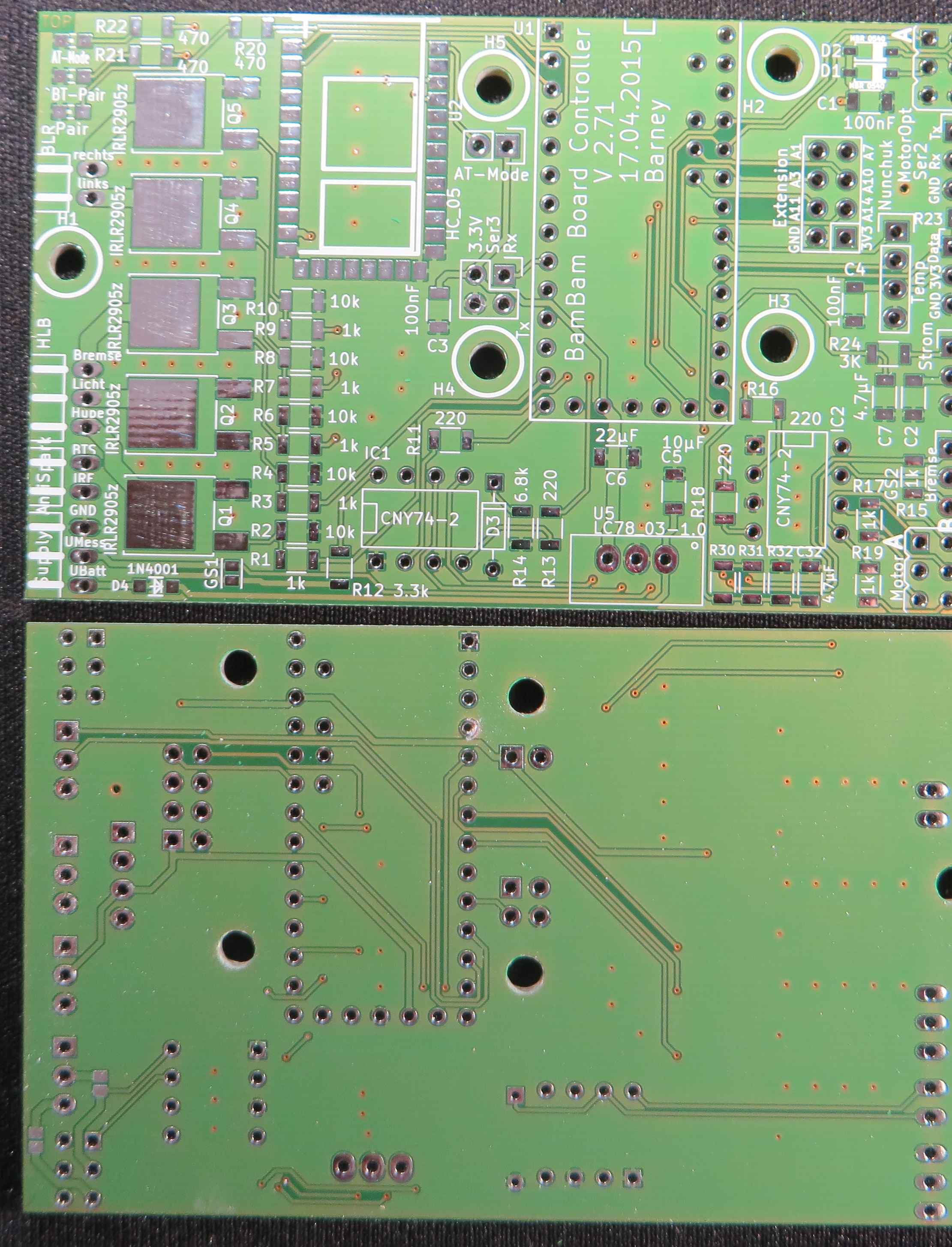
Die Leiterplatten sind angekommen: Und die Sensoren passen komplett auf die Platine!

-
Die neuen Platinen sind da: Gut, dass die Leiterplatten auf Kurzschluss und Durchgang getestet werden. Siehe Teensy Pin.
-
Hallo Gerald Wenn ich meine Fahrströme sehe, reichen auch 50A bei 26V völlig aus. Mein Trampa möchte ich mit 12S betreiben, wo 100A völlig ausreichen sollten. Wichtig ist ein niedriger Innenwiderstand im MOSFET, da I^2 * R, hier 10.000 * 0.0016 Ohm ~ 16W darstellt. Die 100A fließen auch nicht durch einen Transistor. Der gewählte MOSFET hält auch einen recht hohen Impulsstrom aus. Hier habe ich noch keinen Erfahrung, wie die Verhältnisse ausfallen. Durch die Induktivität sollten die Spitzen nicht so heftig sein. Bremsstrom: Hier mache ich mir eher Sorgen. Wenn eXo sich die Schweizer Alpen mit einem Gefälle von 100% hinunter stürzt, bleibt vom Regler nicht mehr viel übrig. Von eXo aber auch nicht. Den Xerun aufbohren? Da hätte ich keine große Hoffnung. Die MOSFETs haben oft die Stufung 20V, 40V, 55V, 60V. Ja, es gibt immer Exoten, aber da müsstest du den Xerun öffnen, die MOSFETs bestimmen, die Kondensatoren checken und Prüfen, was die mit der Versorgungsspannung noch so machen. VG Barney
-
Da kann ich dir in allen Punkten nur zustimmen! Leiterplatten mit 75µm und vierlagig sprengt den Hobbypreisrahmen. Da kann ich gegen Flier oder anderen Anbieter nicht gegenhalten. Ich hätte gerne einige Fotos von abgebrannten Reglern. Wer weiß, was ich noch nicht bedacht habe. Mit der Leiterplattengröße hardere ich noch. Und ob zwei oder drei MOSFETs parallel verwendet werden sollten.
-
Hi Beatbuzzer, ich hätte gerne hier einen schnelleren Erfolg vermeldet, aber das Layout für 200A (2-3 MOSFETs in Parallelschaltung) ist nicht erbaulich und ich habe auch keine Erfahrung darin. Aufgrund der hier entstandenen Diskussion habe ich ein streng modularen Aufbau geprüft. Der Vorteil läge mit drei einzelnen Leistungsmodulen pro Motor, die im Fehlerfall bequem getauscht werden können. Das Layout wäre sehr einfach und ohne Durchkontaktierungen gewesen, aber der Flächenbedarf wäre nicht mehr kompakt. Hier hätte ich auch deinen Vorschlag die Treiberstufen mit auf die Leistungsplatine zu integrieren, einfach umsetzen können. Ich bin derzeit mit keinem Layoutansatz zufrieden und muss noch einige Stunden darüber grübeln. Viele Grüße Barney
-
Hallo Dude, zu 1.) Ich habe Fastrun rein aus Interesse implementiert. Natürlich habe ich die Ausführungszeiten gemessen und verglichen. Bei bestimmten Operationen, wie Berechnungen, ist eine Verkürzung der Ausführungszeit zu beobachten. Keinen positiven Effekt konnte ich bei Schnittstellenoperationen messen, was auch zu erwarten war. zu 2.) Die Drivemode Umschaltung in der jetzigen Form hat zu Situationen geführt, wo die Winkelgeschwindigkeit des Rades höher war als mein Hintern es erwartet hat. Das Board war zweimal Autonom unterwegs, was ich im Sinne des Fahrspaßes für Suboptimal halte. Die Routine müsste auch ein Zeitfenster bekommen, wo die Kommandokette als gewollt erkannt und gewertet wird. Meine damit, eine Umschaltung sollte innerhalb von 2 Sekunden erfolgen, danach sollten eventuelle Teilkommandos verworfen werden. zu 3.) Kannst du gerne wieder reaktivieren. War nicht beabsichtigt. Wenn du gerade dabei bist am Code was zu ändern, dann siehe dir bitte mal die Bremsservo Routine an, die ist nur Rudimentär und nicht gerade funktionell. Auch der Blinker ist nicht wirklich Blinkig. Ich habe momentan für die Programmierung keine Zeit und möchte lieber an den Leiterplatten weiterarbeiten. VG Barney
-
Lüfter sind nicht wirklich angesagt. Und das Gewicht ist auch nicht ohne. Ansonsten spricht nichts dagegen.
-
Einschleimen! Sonst wird das nichts.
-
Und die 5000W. Jaaa, nicht Downhilling, sondern Uphilling. Da machen die Radfahrer Augen, wenn du lässig ihnen entgegen fliegst. :peace:
-
Hi Dude, ich habe im Wiki einen Abschnitt, welche Pins umgelötet werde müssen, damit die neue ADC-Routine verwendet werden kann. Wenn du kein Brmesservo verwendest, musst du nur eine Brücke löten, die mit Fotos in Wiki dokumentiert sind. Beide Varianten lassen sich nicht per Software abbilden, da zwei ADCs im Teensy sind, die nur bestimmte Pins adressieren können. Leider nicht die Pins die ich in den früheren Versionen verwendet habe. Wenn beide ADCs gleichzeitig laufen, kann ich die Average Routine im Teensy (Hardware) verwenden. Das macht die Messungen störunanfälliger gegen Rauschen. Hast du das Polynom schon getestet? Wenn was im Wiki nicht zu erkennen sein sollte, bitte ich ausdrücklich um Änderungen. Gerade meine Schlechtschreibung und die Joda Satzbauten. VG Barney