barney
-
Gesamte Inhalte
3.658 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
8
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von barney
-
Hi Dude, ich kann mich nur anschließen! Die Firmware 2.15 läuft mit Hall-Sensoren super. Ich musste aber KP und KI nicht anpassen. Motor C6364 mit der Hall-Platine v1.3. Ich habe mal im BLDC-Mode die Hall-Erkennung gesichtet. Da werden die Sensoren plötzlich anders erkannt. Warum auch immer. Grüße Barney
-
http://3druck.com/lieferantenhaendler
-
Wenn ich den Schaltplan 4.11 als Grundlage nehme, könnte es mehrere Erklärungen geben: 12S -> 43,2V Nennspannung, 50,4V Ladeschlussspannung 1. Die Kondensatoren, die mit der Akkuspannung in Berührung kommen sind nicht großzügig ausgelegt. Viele Kondensatoren sind nur für 50V ausgelegt. Ein frisch aufgeladenes Akkupack mit 12S hat aber knapp 51V. Das ist direkt noch nicht so schlimm für den Kondensator ansich, aber wie ich schon hier geschrieben habe, andert sich die Kapazität der Kondensatoren der SMD Bauform 0603 erheblich mit ansteigender Spannung. Die betreffenden Kondensatoren haben nur noch ein Bruchteil der Kapazität und erfüllen nicht mehr ihre Aufgabe. In deinem Fall könnte eine Fehlbestückung mit einer falschen Spannungsklasse den Effekt verstärkt haben. Benjamin ist da sehr dicht an die Grenze gegangen und manche scheinen dann Pech zu haben. (Der ESC ist trotzdem super). Vermutung 2. Die Eingangskondensatoren sind nicht die richtigen gewesen, oder zu weit weg, oder falscher Querschnitt. Wie mahnend im Schaltplan steht, sollen die drei (oder zwei) Kondensatoren die Spannungspeaks durch die Induktivitäten abfangen. Das scheint bei euch nicht der Fall gewesen zu sein. Der VESC sollte nochmal überarbeitet werden. 63V Kondensatoren und die Bauform 1206 sollten an mehrere Stellen Verwendung finden. Ein Teil der Blockkondensatoren sollten einen Platz auf der Leiterplatte bekommen. Jeder ESC Hersteller (die ich kenne!) hatt die Kondensatoren direkt an die MOSFET Schiene angeschlossen. Hilft dir alles leider nicht. Barney
-
Da hat eXo einen Link mit deutschlandweiten Dienstleister für 3D Druck gepostet.
-
Nunchuk Joystick nicht notwendig. Der USB Seriell Umsetzer sichten und ob du D+ D- vertauscht hast.
-
Ja, Und auch den von Toshiba[emoji51] Nee mal im Ernst. Einige Parameter werden für ein Motormodell schon benötigt. Derzeit sind es zuwenig Parameter.
-
Endlich frei verfügbar, die Beschreibung vom Toshiba Sigma. Einige Parameter würden im VESC Sinn machen. Ab Seite 11 sehr interessant http://toshiba.semicon-storage.com/content/dam/toshiba-ss/emea/en_gb/motorcontrol/motormind/TOSHIBA%20MotorMind%20-%20Usage%20Guide.pdf Stammseite http://toshiba.semicon-storage.com/de/product/microcomputer/designsupport/motor-control-tool/applicationnote/motor-control-downloads.html
-

Streetboard Eigenbau Konfigurationscheck, Verbesserungen erwünscht
barney antwortete auf Rollexus's Thema in: Eigenbauten
Du Ketzer, mögen die die Inquisitoren der FOC von der reinen Lehre überzeugen. [emoji83] Du hast recht. FOC funktioniert nur gut, wenn das Motormodell stimmt. Ich bin von den automatischen Messwerten des VESC nicht überzeugt. Da sind zum Teil Faktoren in der Größenordnungen von 2 dabei. Mit dem Toshiba Sigma konnte ich einige Erfahrungen sammeln, was es bedeutet wenn R und L nicht stimmen. Man musste für 🌟 und ⛛ die Werte umrechnen, damit der Sigma vernünftig arbeitet. Die Anleitung für die Parameter Bestimmung hatte einige Seiten Länge. Ich hatte bei Benjamin angefragt, ob er er sich sicher mit der Messung ist. Bisher leider keine befriedingende Antwort. Der VESC wird sein FOC Potential noch entfalten, wenn die Werte stimmen. Und die Positionsbestimmung verbessert wurde. Bis dato fahre ich lieber BLDC. -
JST PM 2-7 Pole Da muss jemand die 7 poligen angefragt haben, die sind jetzt auch im Programm: http://shop.taja-elektronik.de/epages/es981600.sf/de_DE/?ObjectPath=/Shops/es981600/Categories/Stecker_und_Schalter/Verbinder/JST_Serie_PH/Stecker_mit_Kabel
-
Streetboard Eigenbau Konfigurationscheck, Verbesserungen erwünscht
barney antwortete auf Rollexus's Thema in: Eigenbauten
Hin und wieder habe ich helle Momente, wo ich das gelesene auch richtig inhaltlich erfasse und verstehe. Der BLDC-Modus pfeift bei mit nur am Anfang und ist vernachlässigbar im Geräusch. Da sind die Lager und der Aufbau lauter. Du kannst beim Anfahren singen um das Geräusch zu überdecken. Es gibt mindestens zwei Methoden: Spektrale Maskierung Zeitliche Maskierung Wenn du schräg genug singst, greift die Zeitliche Maskierung. -
Streetboard Eigenbau Konfigurationscheck, Verbesserungen erwünscht
barney antwortete auf Rollexus's Thema in: Eigenbauten
Bitte nicht mehr die Version Excel verwenden!!! http://www.elektro-skateboard.de/wiki/wissenswertes/strom-spannung-reichweite-test Habe ich die Excel Version immer noch nicht gelöscht? -
Streetboard Eigenbau Konfigurationscheck, Verbesserungen erwünscht
barney antwortete auf Rollexus's Thema in: Eigenbauten
Also für das Firmwareupdate nehme ich den ST-Link v2 und koppel den VESC vom Akku ab. Ich habe es geschafft den Mikrocontroller beim Firmwareupdate über das BLDC-Tool zu killen, als er am Konstanter angeschlossen war. Es scheint da sehr selten Probleme zu geben. Es ist schade zu hören, dass es auch anderen passiert. BLDC vs FOC Da ich Probleme mit FOC und Sensoren hatte, fahre ich BLDC mit Hall-Sensoren. Dude nutzt (heißt nicht das er damit fährt!) mit der Firmware 2.15 mit angepassten Ki und Kp, FOC und Hall-Sensoren. Ich werde auch bei Gelegenheit auf die aktuelle Version, mit FOC, umstellen. PS Kannst du Störfälle mal als Link bereitstellen? -
Noch ein Kabel http://www.••••.de/itm/Adapterkabel-USB-Micro-Stecker-A-auf-USB-Mini-B-5pol-Buchse-Kabel-Mini-Adapter-/121663160901?hash=item1c53b08245:g:Hn0AAOSwstxVZtY9 Damit hat man eine µB-Buchse mit Kabel, wo der Stecker abgeschnitten werden kann. Die Buchse hat den Vorteil, dass man sein Android Ladekabel verwenden kann.
-
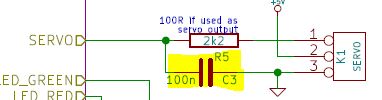
Der zweite Block beschreibt die Verbindung zwischen der VESC HW4.7 und der nRF Platine. Die 4.7 fehlt ein Pin, der vom Servo geliehen wird. Der Servo Pin hat aber einen Tiefpass (Kondensator C3), der vorher ausgelötet werden muss. Ganz wichtig ist, nicht die 5V mit 3.3V zu verwechseln, sonst der nRF befriedet.

-
Oh, dass kommt davon wenn man den Tag lang Informationen kreuz- und quer liest. Entschuldigung. 500mA sollten sowieso ewig reichen. Ich finde sowieso ist es recht mühselig an Informationen geordnet ran zukommen. Ich habe die Hardware 4.7. Der Schaltplan kann im GIT gefunden werden. Aber nicht direkt! Mit dem fehlenden Ausschalter finde ich nicht so gelungen. Er hat schöne Sachen gemacht, wie die Akkumessung zu schalten, damit der Spannungsteiler nicht ständig am Akku hängt. Der STM kann sich mit wenigen µA schlafen legen, der nRF soll bei power down 900nA ziehen. Für Vielfahrer sicherlich so gut annehmbar, aber für Gelegenheitsfahrer doch etwas fraglich. Ich lasse mich überraschen.
-
War eine Ideensammlung für das Wiki. Ich kopiere meist bestätigte Gedanken in das Wiki, war also nicht direkt für dich.
-
Nunchuk mit zwei Akkus http://www.electric-skateboard.builders/t/vesc-nunchuk-rf/588/28 USB-B Buchse Du hast recht falsches Bauteil Kopiert Ich meinte USB micro B auf Leiterplatte zum löten. http://www.••••.de/itm/Micro-USB-Buchse-Port-Module-fur-Prototyping-Arduino-PCB-Platte-Steckbrett-2-54-/221587090671?hash=item33979eacef:g:1KgAAOSwDN1UTXPg Schalter Der fehlt schlicht
-
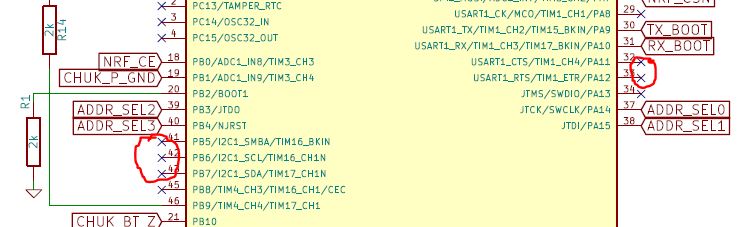
VESC Version HW4.7 CE -> Tied to VCC CSN -> The servo input (you have to remove the lowpass filter on the servo input) C3 SCK -> The ADC_EXT pin MOSI -> The SDA pin MISO -> The SCL pin IRQ -> not connected VCC -> VCC GND -> GND Pinout nRF <-> P3 P1- 3.3V <-> P5 3.3V P2- GND <-> P4 GND P3- CE <-> P5 3.3V P4- CSN <-> K1P1 Servo P5- SCK <-> P3 ADC P6- MOSI <-> P2 SDA P7- MISO <-> P1 SCL P8 -IRQ <-> NC
-
Was mir so fehlt: Schalter http://www.segor.de/#Q=PCM12SM&M=1 HEX-Codierschalter http://www.segor.de/#Q=PT65103L254&M=1 USB-B Buchse lötbar http://www.segor.de/#Q=USB-miniatur8ST&M=1 Hat da jemand was besseres?
-
WS28112 Es sind noch Pins am STM frei, womit du dies machen könntest. Ich würde aber eher ein OLED favorisieren. http://www.••••.de/itm/Blue-3-3V-5V-I2C-IIC-128X64-OLED-LCD-LED-Screen-Display-Module-for-Arduino-STM32-/131638518460?hash=item1ea64462bc:g:a7oAAOSwo6lWLy6P Akku Im Internet hat jemand 2 x 470mA angelötet und untergebracht. Ich würde im Gehäuse von thermische Kapazität sprechen. Der Ladechip ist das sehr isoliert im Gehäuse. Weiter stell dir vor, dass du den Nunchuk im Sommer bei 30°C auf dem Tisch auflädst und der auch noch leicht in der Sonne liegt. Vorbei ist es mit der thermischen Kapazität. Test Ja du wirst mit dem Oszi ein Clocksignal sehen SCL und wenn du ein Zweikanal hast, dazu die Daten. das ist doch Lebenszeichen genug Ich habe die Anmerkung nicht wirklich verstanden.
-
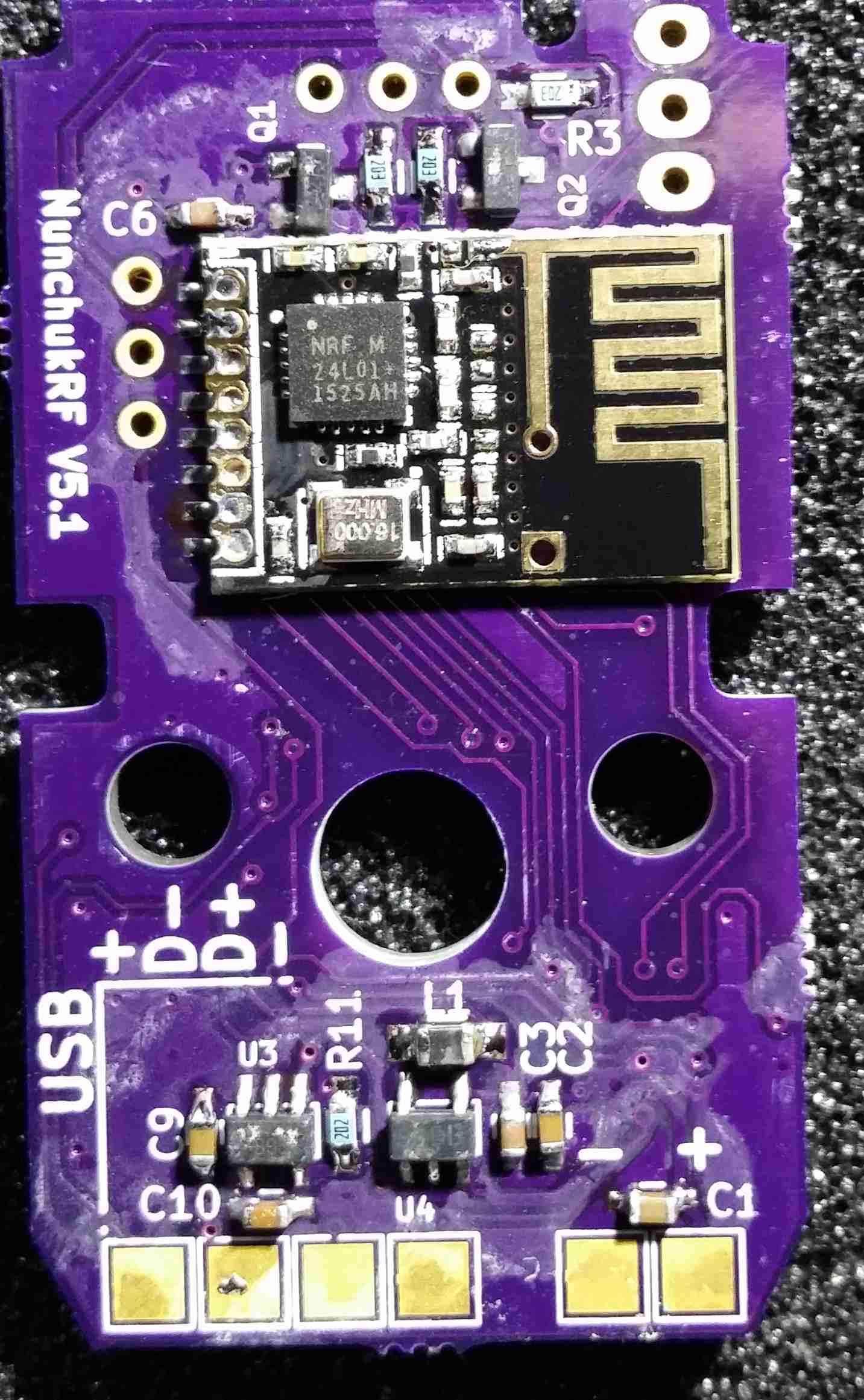
Hallo hexakopter, hier die Auflösung: Filename Makefile # Define project name here PROJECT = ws2812_rf Du kannst es auch umbenennen in "meine_freundin_liest_gerne_50SoG". nRF http://www.••••.de/itm/nRF24L01-2-4-GHz-Wireless-Transceiver-Modul-Breakout-Board-/111901540764?hash=item1a0dda019c:g:iZcAAOSwo3pWhE3s Akku 1000mA müssen länger geladen werden, wenn es leer ist. Der kleine Ladechip muss aus 5.2V ca. 3.2V mit 500mA Ladestrom. Es fallen ca 2V ab, dies hat ca. 1W Verlustleistung am Anfang zur Folge. Sieh dir mal den kleinen Chip an und stell dir, dass der im Gehäuse kaum Luft bekommt. Die Leiterplatte vom Layout zu wenig Kupferfläche, so dass der Chip sich auch hier nicht richtig kühlen kann. Test Mutmaßung von mir. Aber der nRF wird programmiert, so dass eine direkte Verbindung nicht helfen wird. Da wirst du wohl den harten Weg gehen müssen. Barney
-
Hallo hexakopter, WS2812 Verschwörungstheoretiker sind der Meinung, das die LED-Streifen mit dem WS2812 Chipsatz mehr können als nur LEDs ansteuern. Durch geeignete Zusammenschaltung von LED-Abschnitte kann unter Berücksichtigung von Labda/2 ein Mittelwellensignal über viele Km übertragen werden. Die Modulation wird erreicht indem die LEDs sehr kurzzeitig angesteuert werden, so dass ein Mensch dies nicht optisch wahrnehmen können. Ein vierter Kanal in der LED kann ein Mikrophone auswerten. Durch die Nutzung von vielen dutzenden Mikrophone kann ein Phasenarray, also eine Richtwirkung erzielt werden. NSA, FBI, BND und andere Nachrichtendienste habe an dieser Technologie mitgewirkt. Dabei wurden IPs von STM verwendet. Schlussendlich hat Vedder aus versehen diese Technologie offengelegt. Ich befürchte schlimmstes....
-
Hier läuft ein Bootlader von Benjamin. Nicht der von STM default.
-
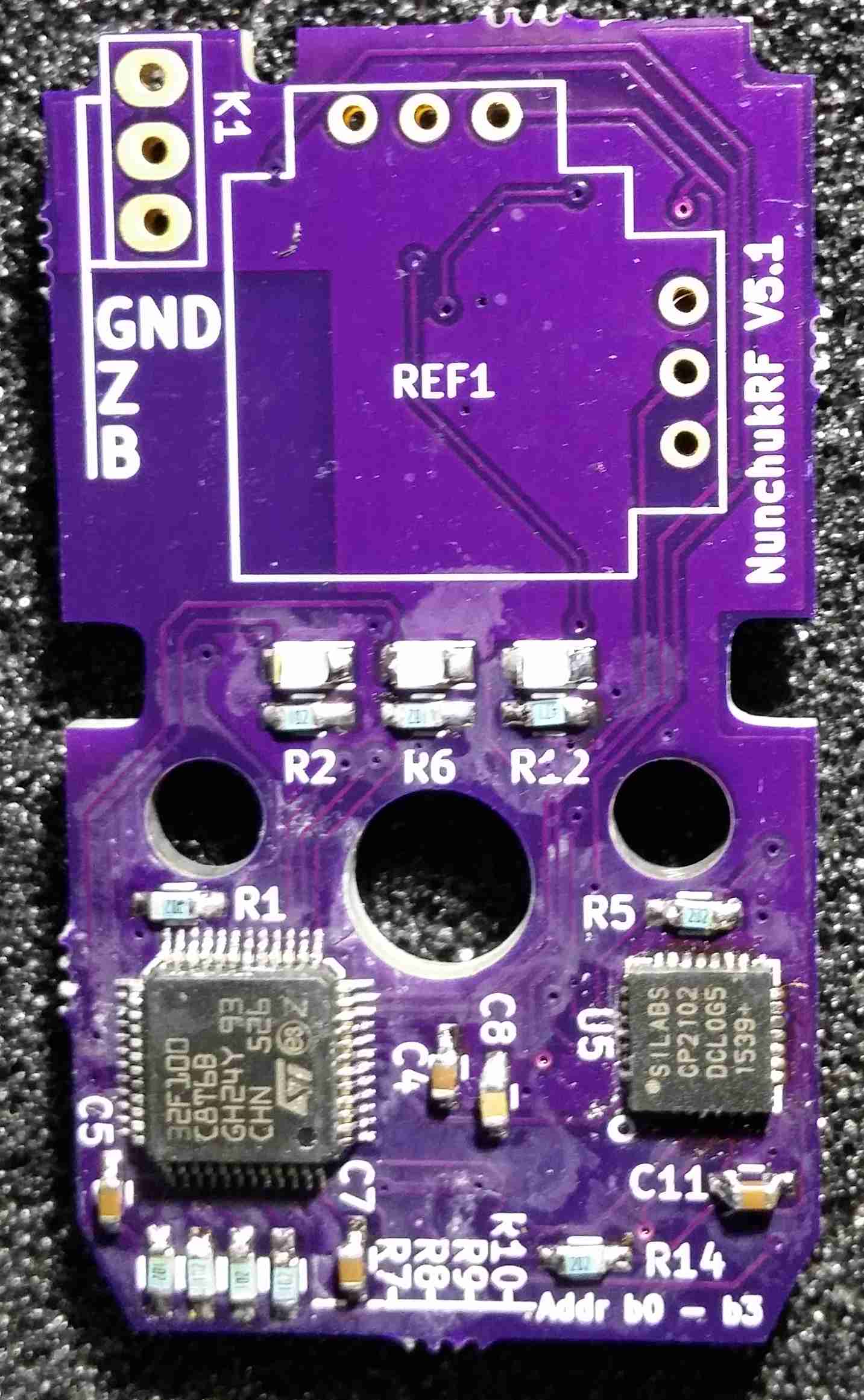
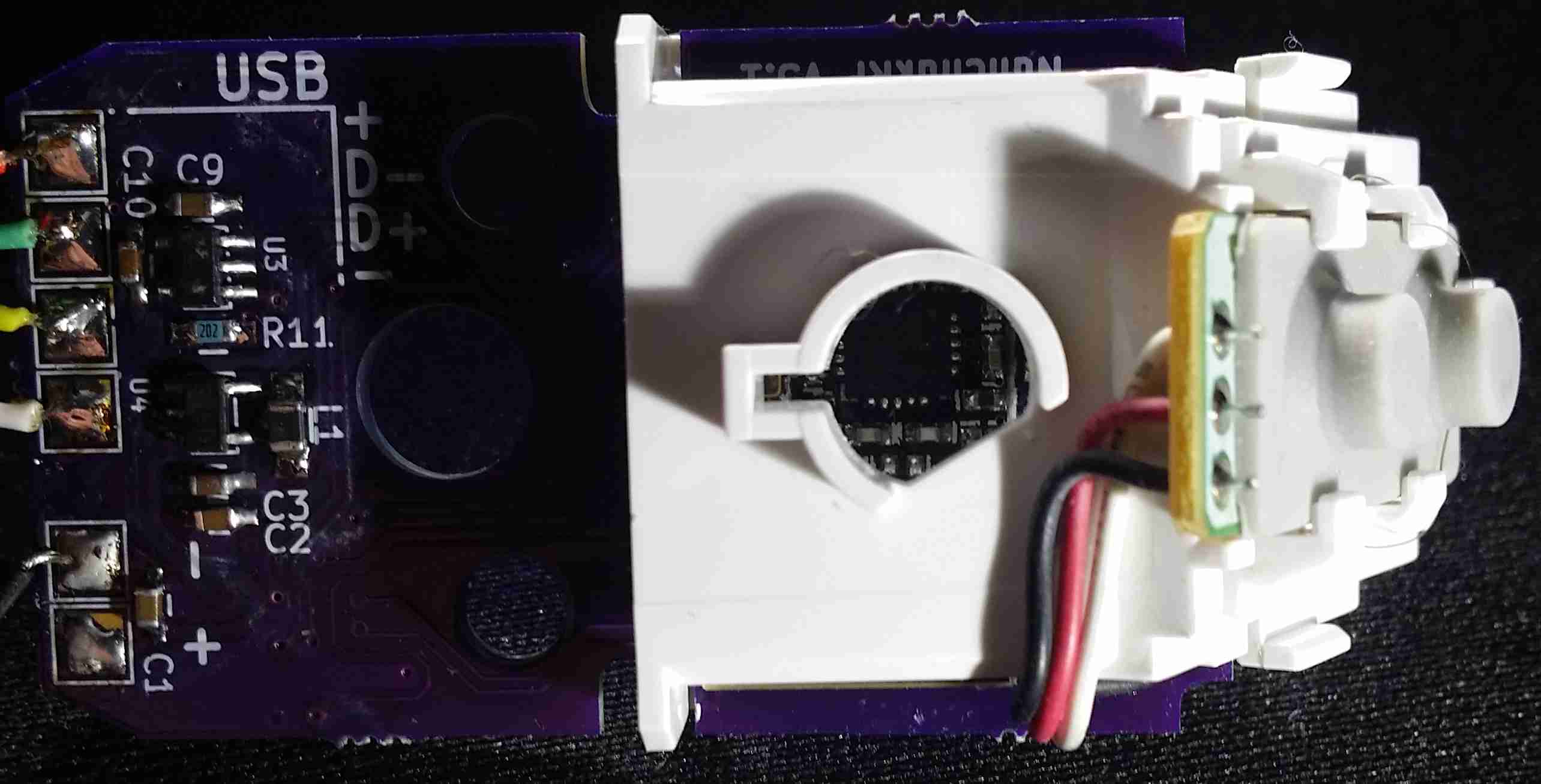
Bootloader Der Bootloader ist im STM default drauf. Der CP2102 übernimmt die Arbeit der USB-COM Wandlung. Du musst wirklich nur den USB-Anschluss anlöten und am Computer den Nunchuk anschließen. Dann startest du das make File. Nach dem Kompilieren make upload und das wars. Mehr ist wirklich nicht zu machen. Kanalwahl Ja, die Widerstände sind aber recht statisch und fast alle Bilder die ich gesehen haben, habe alle Widerstände drauf und damit den gleichen Kanal. Das ist nicht sehr sinning:devil: Nutze die Gelegenheit nach dem Zufallsprinzip, eine andere Kombination zu wählen. Ich werde auch einige auslöten. Daher der Hinweis BCD-Kodierschalter. Und hier habe ich mich vertan. Ich meine HEX-Codierschalter http://www.segor.de/#Q=ERD116RSZ&M=1 Damit ist ein Kanalwechsel recht einfach möglich. Am Empfänger aber noch nicht!
-
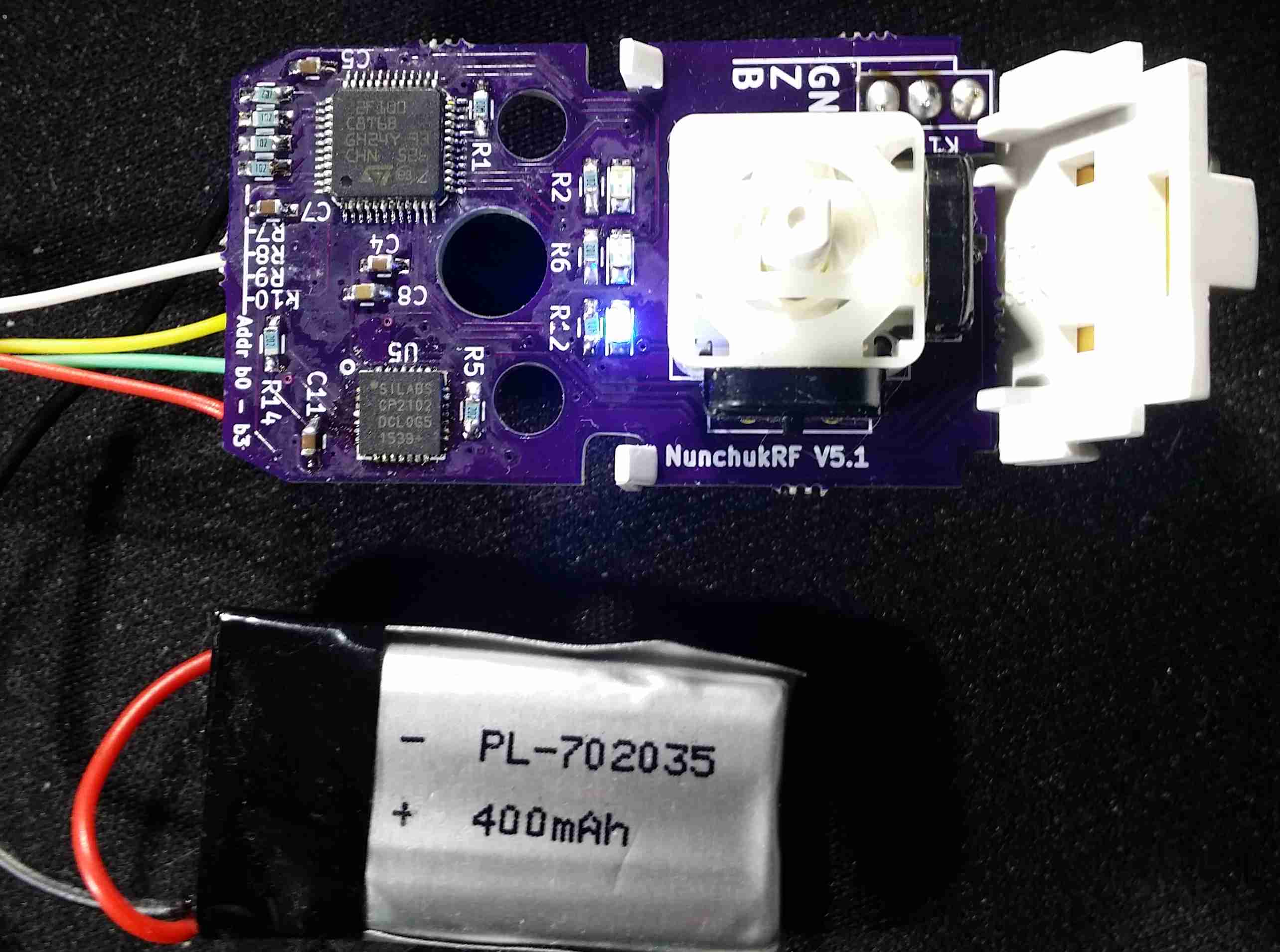
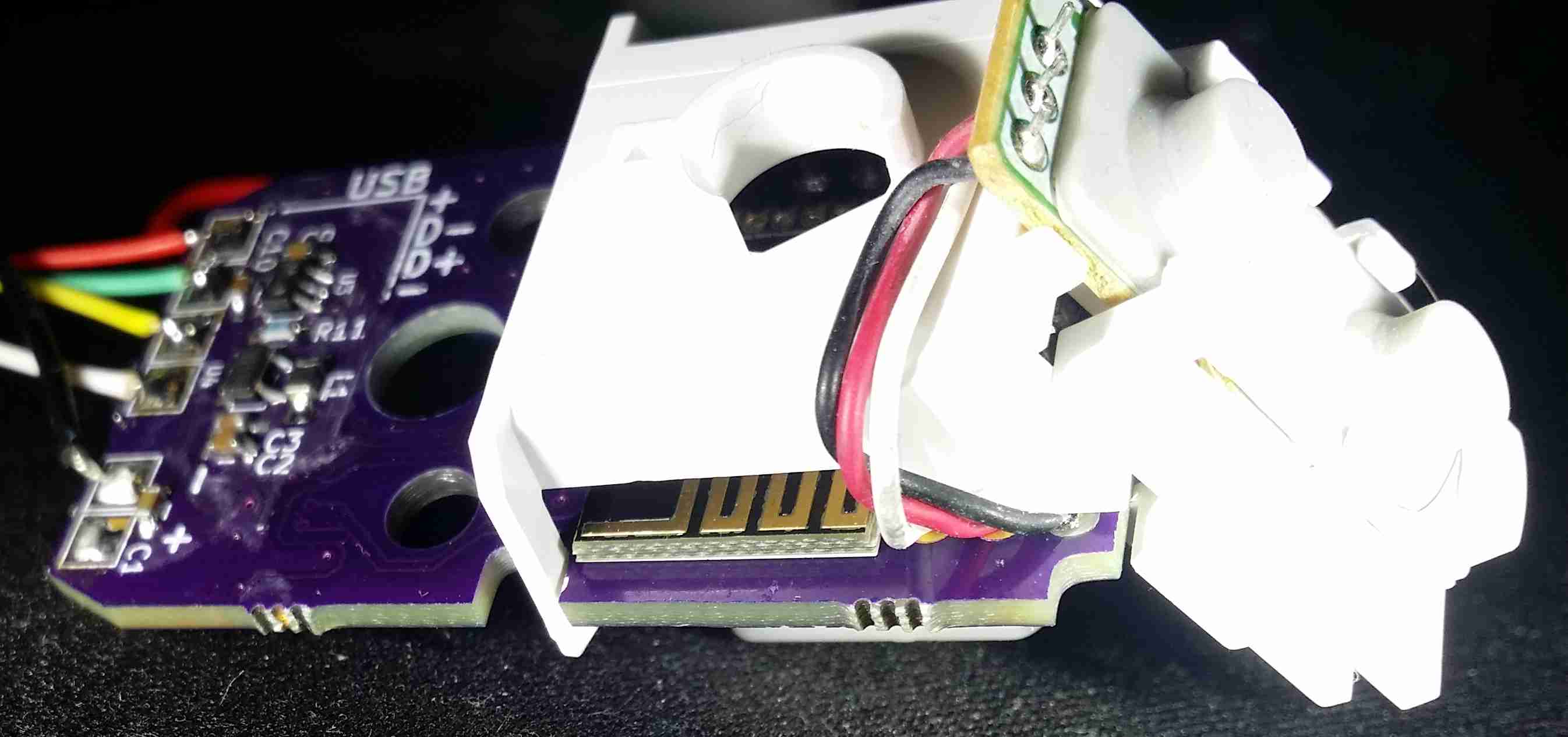
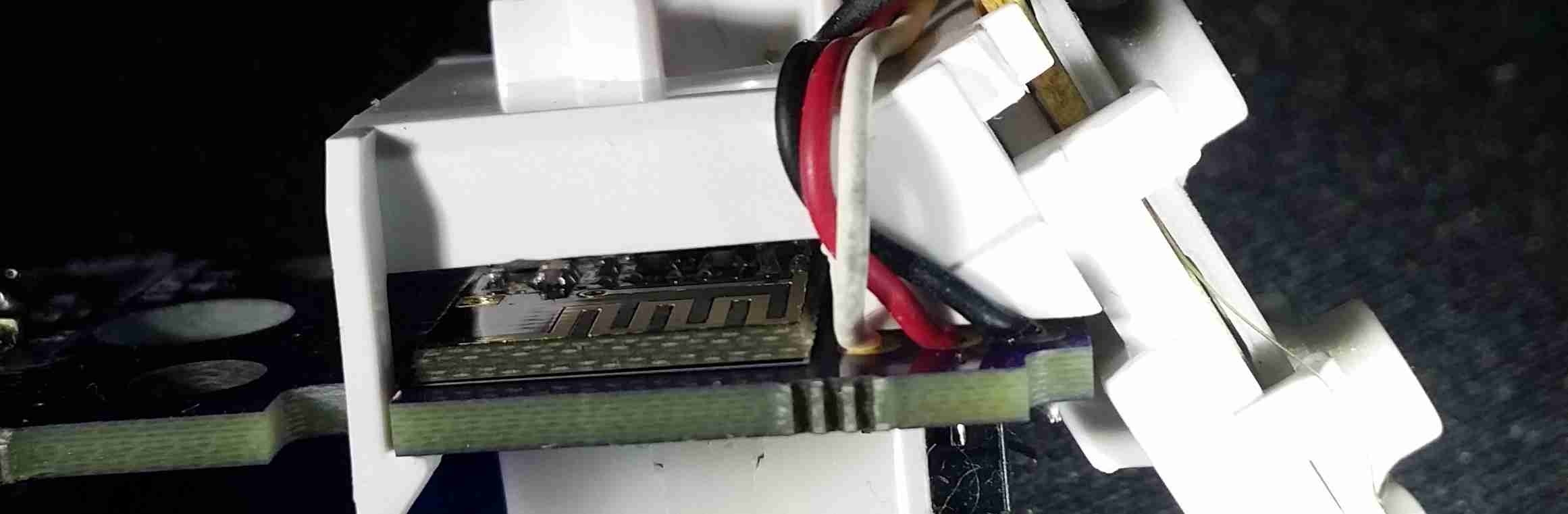
Hi Dude, hier die Früchte deiner Arbeit! Anbei die Programmierung: (Windows) https://sourceforge.net/projects/stm32flash/ Programmieren Vortest Blaue LED leuchtet? Wenn ja-> Ist der Nunchuk da? #stm32flash.exe COM3 <- ihr müsst natürlich nachsehen welche COM bei euch da ist! Programmieren Dann Das Programm hochladen: (das HEX-File liegt im selben Verzeichnis wie die STM-EXE) stm32flash.exe -w ws2812_rf.hex -v -g 0x0 COM3 Aktivieren USB-Anschluss ziehen und wieder anstecken. Alle LEDs blinken vor sich hin. Dann leuchtet nur noch die blaue LED. Zusammenbau Der weiße Steg im Nunchuk Gehäuse drückt auf die nRF-Platine. Dieser Steg muss gekürzt werden, sonnst schwebt die Leiterplatte 2-3mm in der Luft und die Taster lassen sich nicht bedienen. Empfangstest Bleibe ich noch schuldig, bis die nRF-Platinen bei mir sind. Designänderungswünsche * Ein-/ Ausschalter auf der Leiterplatte * DIP-Schalter oder BCD-Codierer für die Kanalauswahl. SMD-Widerstände-Löten, wenn man sich mit Freunden trifft ist nicht easy:D @Dude Ich werfe mich für diese Lötkunst (Nervenstärke) zu Boden. Barney Edit: Firmware und STM-Software (Windows) im ZIP-File Ladeelektronik funktioniert, wird aber sehr warm. Ich habe nur ein 400mA Akku angeschlossen, später soll da ein 1000mA Akku ran. Ich mache mir da etwas sorgen. Nunchuk.zip