barney
-
Gesamte Inhalte
3.658 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
8
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von barney
-
At 14% hill climbing your Motor has an 1500W load. Your 12S2P battery holds 4.4Km :-(
-
Your motor goes very well, as long as you need to climb any mountains. I look for some English words at google.
-
That's right, when the engine is not fully powered, it can not give the full power in case of maximum load.
-
You always paying attention only to the engine, you need to also look at the battery. The energy in the battery determines the range. The voltage of the battery, the speed. A 10S engine can bring its specified performance only when 10S supply voltage. In 5S it can reach only a quarter of the power at full load.
-
If your battery, for example, a Sony VTC5A and consists of 10S 2P cells, you have an energy of 182Wh available. If you drive with 30Km/h (352W), you can ride it for 30 minutes. This is approximately 15Km range.
-
Your body has a certain Wind resistance, at 30Km/h. This resistance must be overcome by the motor. This is approximately 352W. If you drive faster, the wind resistance increases quadratically.
-
Wenn du 30Km/h fährst, musst du einen bestimmten Windwiderstand überwinden. Du benötigst eine bestimmte Kraft, die im Rechner in Leistung überführt wird. Also wenn du 30 Km/h fährst, muss der Motor eine Leistung von 352W leisten. Da dein Motor 1500W bei voller Spannungsversorgung liefern könnte, liegst du mit 352W weit drunter. Bis dahin verstanden?
-
Ganz von vorne: Du möchtest was erreichen? Max Speed: 30Km/h Distance: ? Motor: 120KV -> 111KV, 10S Akku: Sony VTC5A, 10S, 2P Rad: 83mm Übersetzung: 36/17 ! pp hill climb:0% -> Speed 29.5 Distance at max Speed: 14,9Km Power: 352W far away from 1500W
-
Von 120 KV bleiben unter last 105 bis 110 KV übrig. Das sind ca. 10% weniger Geschwindigkeit als mit dem Tool berechnet. Ich würde eher die Übersetzung so wählen, Das 20 Km/h bei 24V übrig bleiben. Bei 36V wären das um die 30Km/h. Drehmoment ergibt sich durch den Luftwiderstand. Du siehst unten, wieviel W umgesetzt werden. Da solltest du bei 30Km/h weit unter 1500W sein. Ein Yuneec hat weit unter 1500W. Also lass dich nicht verrückt machen. Wichtig ist, was kann dein Motor bei 24V an Leistung liefern. Ein 12S Motor mit 2000W hat bei 6S maximal 500W. Sowas zeigt der Rechner oben beim Motor an, wenn du S beim Akku ausgewählt hast. Grüße Barney
-
Danke, bastle mal ein Banner und Icon und ich schreibe Kai an. Grüße Barney
-
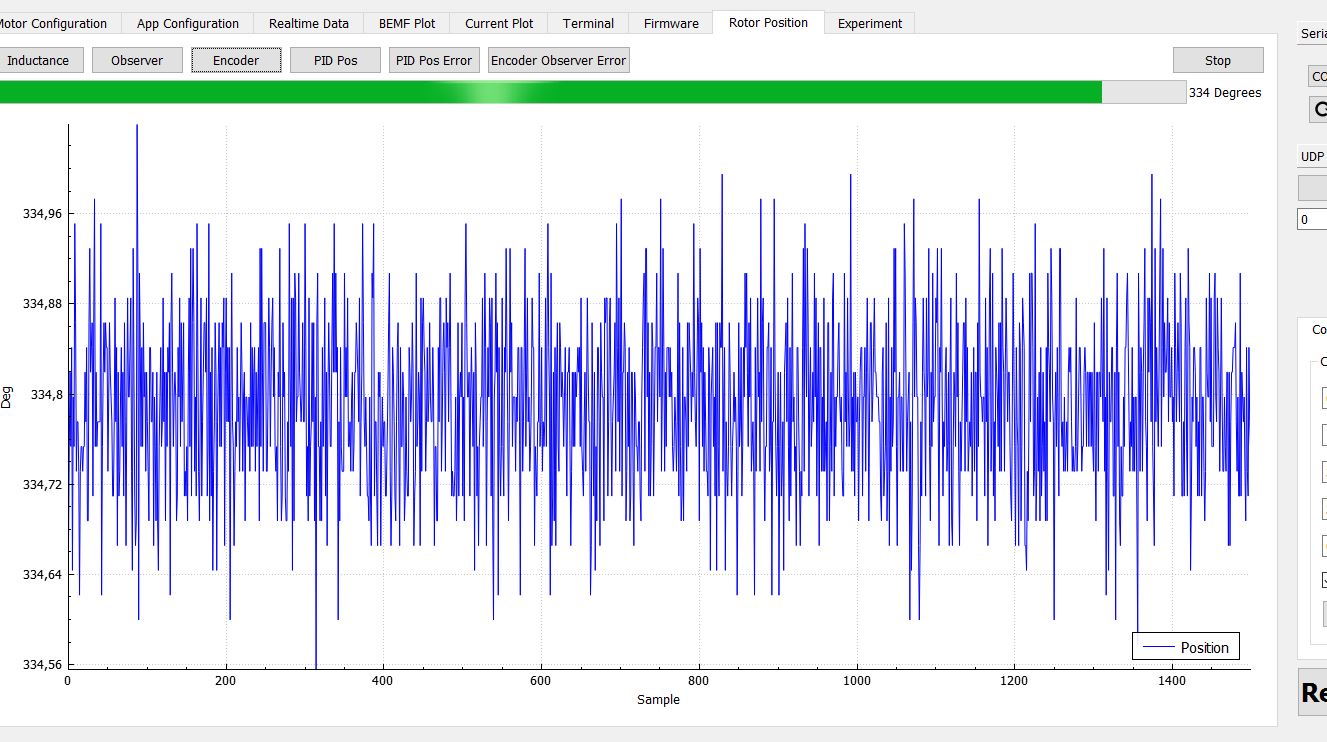
Alles was zum Anfang schön klingt, hat eine Fußangel: Der Sensor hat eine spezifizierte Abweichung von 1°. Derzeit kommt man viel liebe auf 2° Einstellgenauigkeit. Die 1° beziehen sich auf die Nichtlinearität es magnetischen Messsensors. Der Sensor ist aber auf 0.1X° in der Wiederholung genau. Durch die 7Poligkeit muss man den Fehler mal 7 nehmen, was bei 2° folglich 14° bedeutet. Benjamin hat eine sinusförmige Abweichung zwischen dem Observer und dem AS5047p festgestellt, so dass er wie bei den Hall-Sensoren, den AS5047P nur bis zu einer bestimmten Geschwindigkeit heranzieht. Er hat aber vor, den AS5047P durch Messungen zu Linearisieren.
-
30Km/h finde ich persönlich ausreichend. Energetisch auch ein guter Kompromiss, damit das Akku nicht zu groß werden muss. Ich habe die neue Version vom Rechner mit englischer Sprache versehen, damit es internationaler wird. Wie weit willst du kommen. Und 1.5kW Motorleistung reichen. Grüße Barnes Mein Englisch ist so schlecht, das ich nur in Deutsch antworten werde, damit du mich lachend unterm Tisch liegst.
-
Was hast du denn vor? Geschwindigkeit, dein Gewicht, ohne Steigung? Und wie immer: (wie oft habe ich mich schon selbst zitiert?) http://www.elektro-skateboard.de/wiki/wissenswertes/strom-spannung-reichweite-vii Und deine Fragen werden beantwortet. Grüße Barney
-
Benjamin hat erst überlegt, ob er die Sensordistanz auswertet. Es hätte beim Ausrichten sehr geholfen. Da aber am Hall-Anschluss nun mal kein Pin mehr frei ist, wo soll er den Pin herholen? Ja, vom anderen Stecker, das ist aber nicht besonders toll. Mit der aktuellen Lösung am Hall-Anschluss, ist jetzt eine kleine Falle eingebaut worden. Die 5.0V sind für den AS5047P nicht wirklich von Vorteil. Man hätte mit den eingebauten Spannungsregler eine super befriedete Spannungsversorgung ohne das CPU-Rauschen, aber leider gibt die Logik vom AS5047P dann nur digitale Signale mit 5V Pegel aus. Die 3.3V vom Spannungsregler sind nämlich ausschließlich für die analoge Sektion. Der ST32 ist zwar 5V tolerant, aber ich hatte kein Glück bei der digitalen Signalauswertung. Benjamin geht mit einer recht hohen Frequenz auf die Serielle Schnittstelle, so das die 5V digitalen Signale, bei einer Kabellänge von 20cm, nur noch Suboptimal sind. Also einen kleinen 3.3V linearen Spannungsregler vorschalten. Der muss nur einige mA liefern können. Ein L78L33... reicht völlig aus. Wer noch seinem AS5047P einen Gefallen tun möchte, kann dazu einen 100nF Keramik Kondensator spendieren. Für mich steht noch der Test aus, wenn die Spannungsversorgung z.B. von einer Batterie kommt, ob dann weniger als +-0.15° Fehlmessung rauszuholen ist und damit das Winkelrauschen verschwindet. Vielleicht kann man Benjamin mit dem VESC 5.0 dazu überreden, eine Hardware UART zu spendieren und einen zweiten Längsregler für den AS. Oder ich muss eine Leiterplatte machen, wo ein Regler drauf ist. Mit einem eigenen Anschluss wäre dann auch ein Pin für die Programmierung des AS5047P möglich. rauscharmer 3.3V Längsregler: LD39015M33 Warum einen Pin hochziehen? Niemals einen Eingang floaten lassen.
-
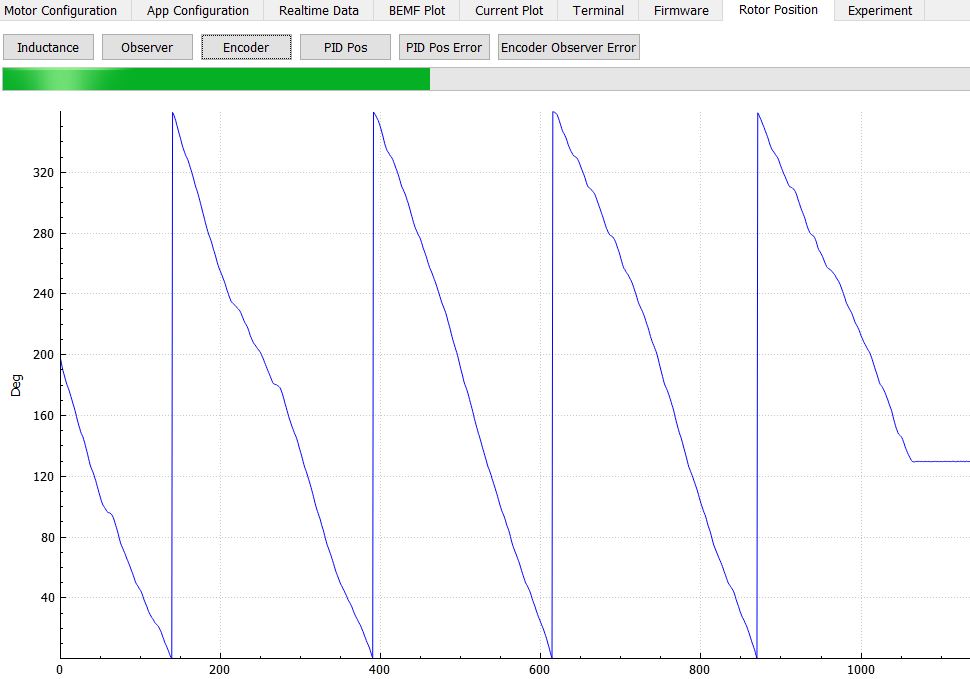
Ich habe ich mit der Kommastelle vertan: +- 0.15° Software SPI SCK -> HALL 1 MISO -> HALL 2 CS -> HALL 3 MOSI -> VCC Bild1: Motor steht, Sensorrauschen Bild2: Motor mit der Hand langsam gedreht

-
Für die FOC geplagten, es gibt jetzt die Möglichkeit den Winkelsensor AS5047P für den FOC-Modus zu nutzen. Der Sensor hat eine hohe Winkelauflösung und kann bis zu einer Drehzahl von 28.000 U/Min Daten liefern. Der Sensor kann auf einem Demoboard, inklusive Spezialmagnet, bei Mouser für €15,- geordert werden. Die Genauigkeit bei ersten Tests lag bei +- 1.5°. Dies ist deutlich genauer als die drei Hall-Sensoren. Das Demoboard muss auf 3.3V umgelötet werden. Da es regnet, konnte ich die Funktion nur im Wohnzimmer testen. Anfahren ist ohne Probleme kraftvoll möglich, die FOC-Bremse lässt zu wünschen übrig. Da ich aber auch im Wohnzimmer sehr langsam Fahre, ist dies keine Aussage für über 30 Km/h Bremsungen. http://ams.com/eng/Products/Magnetic-Position-Sensors/Angle-Position-On-Axis/AS5047P http://ams.com/eng/Support/Demoboards/Magnetic-Position-Sensors/Angle-Position-On-Axis/AS5047P-Adapterboard
-
Du kennst die Hupe nicht. Modell Bundesbahn Güterverkehr. Da können schnell 5kW PMPO zusammenkommen.
-
 Entschuldigen sie Herr Polizei-Hauptmeister, ich habe das Skateboard einfach übersehen.....
Entschuldigen sie Herr Polizei-Hauptmeister, ich habe das Skateboard einfach übersehen..... -
Sieh dir mal diese hier an Seite 50: http://www.roarracing.com/downloads/2010_ROAR_Rule_Book.pdf http://www.jst-mfg.com/product/pdf/eng/eZH.pdf http://www.digikey.de/product-detail/de/jst-sales-america-inc/SZH-002T-P0.5/455-1130-1-ND/527362 ohne Garantie Und der verkauft das Zeug: http://shop.taja-elektronik.de/epages/es981600.sf/de_DE/?ObjectPath=/Shops/es981600/Categories/Testen_und_Messen
-
Wenn du 9S fahren möchtest, benötigst du einen ESC der mindestens 9S verträgt. Damit wäre 12S eine gute Wahl. Ich würde gerne deine Übersetzung wissen. Ich finde deine KV Zahl ungewöhnlich.
-

Tr-AMP-a, Trampa E-MTB eigenbau
barney antwortete auf Bruce Lee's Thema in: Elektro-Skateboard Werkstatt
Hi Bruce Lee, danke für Antwort. Dein Riemenproblem habe ich schon mitgelesen, scheint nicht unproblematisch zu sein. Aber die Belastung der Reifen dürfe auch nicht ganz ohne sein. -
Tr-AMP-a, Trampa E-MTB eigenbau
barney antwortete auf Bruce Lee's Thema in: Elektro-Skateboard Werkstatt
Wie lange hält denn bei dir ein Satz Antriebsreifen? -
Tr-AMP-a, Trampa E-MTB eigenbau
barney antwortete auf Bruce Lee's Thema in: Elektro-Skateboard Werkstatt
Da soll mal einer sagen, das die CH nur Uhren machen können. -
Muss ein Geheimnis sein....