barney
-
Gesamte Inhalte
3.658 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
8
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von barney
-
Ich habe für den Punkt 10 derzeit keine wirkliche Verwendung. Also würde auch gehen. Rechne bitte nicht so schnell mit einem fertigen Programm. Aber wann ist ein Programm jemals wirklich fertig? Wie stellst Du dir denn die Umsetzung vor? Willst du dir die gleiche Hardware kaufen? Vorerst werde ich für einige Tests Opfer bringen müssen. Chrizz wie sieht es mit dir aus. Kann ich dich opfern? Im Namen der Wissenschaft:devil: Grüße Barney
-
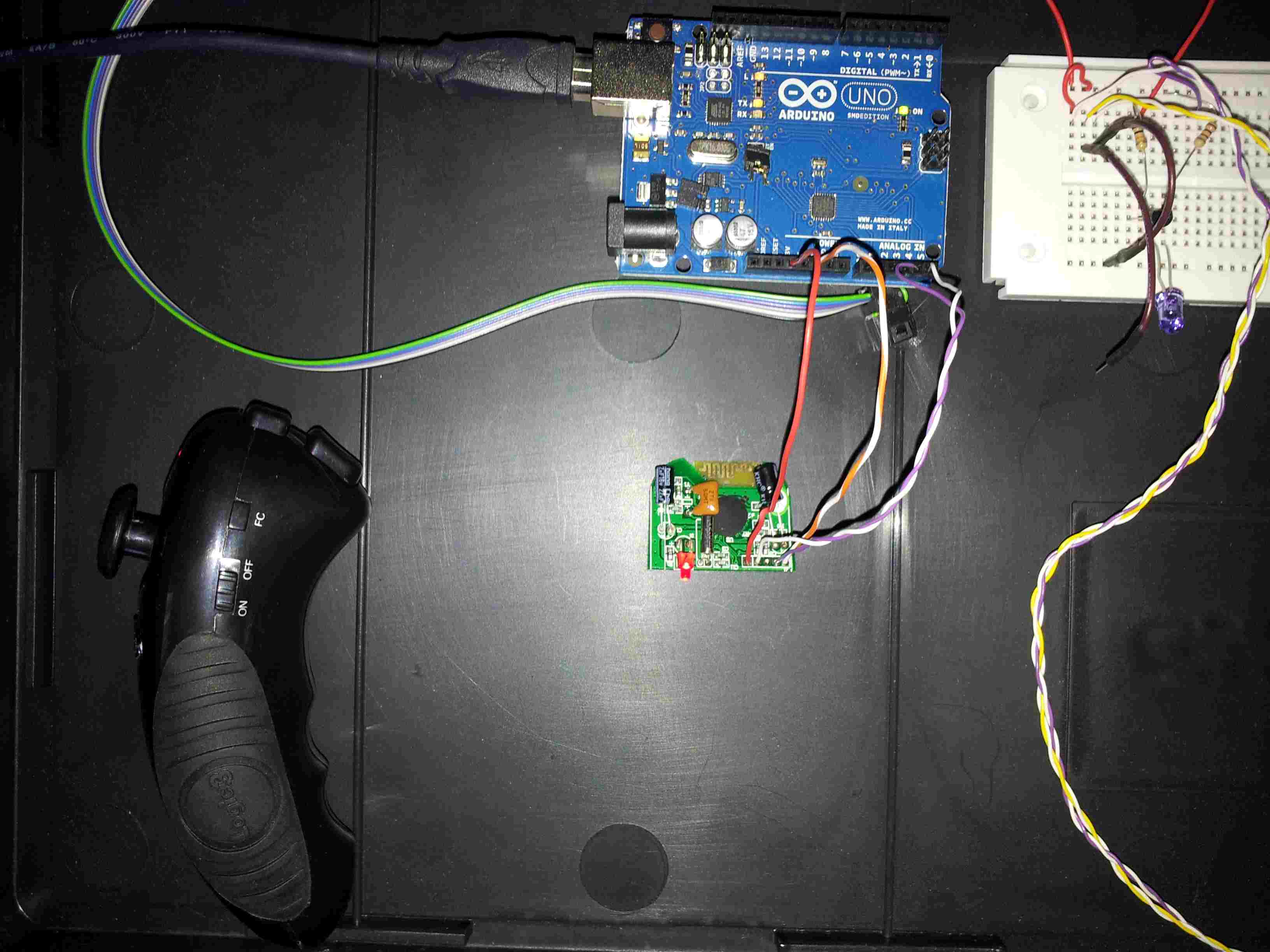
Ich habe aus zwei Demos ein kurzes Programm zusammengeflickt: Es reicht als erste Demo aus. Es hat böse Fallen bei der Initialisierung. Ich möchte dann nicht auf dem Board stehen:D Bei Paaren des Controllers mit dem Empfänger sind alle Zahlen möglich. Nicht besonders schön. Als Indikator könnte die blinkende LED auf dem Empfänger ausgewertet werden. Mal sehen, ob der Status aus dem Empfänger auszulesen ist. Die Reichweite lag bei mir bei über 5m. Ich denke das reicht aus. Dumm ist nur, dass die letzten Werte erhalten bleiben. Das Board ist dann wech:p Das Programm was ich noch schreiben werde, soll wie folgt funktionieren: 1. Z-Taste + Hebel vorn -> beschleunigen 2. Z-Taste + Hebel hinten -> bremsen 3. Z-Taste + Hebel mitte -> Halten des letzten Wertes 4. Z-Taste losgelassen -> Motor Freilauf 5. Z-Taste losgelassen + Hebel hinten -> bremsen 6-9. Wass soll passieren, wenn das Paaring nicht stimmt. 10. C-Taste -> Hupe / Vollbremse / Selbstzerstörung? --------------------------------------------------- #include <Wire.h> #include <ArduinoNunchuk.h> #include <Servo.h> #define BAUDRATE 19200 Servo myservo; // create servo object to control a servo // a maximum of eight servo objects can be created ArduinoNunchuk nunchuk = ArduinoNunchuk(); void setup() { Serial.begin(BAUDRATE); nunchuk.init(); myservo.attach(9); // attaches the servo on pin 9 to the servo object } void loop() { nunchuk.update(); Serial.print(nunchuk.analogY); // Motorsteller myservo.write(nunchuk.analogY); // tell servo to go to position in variable 'pos' Serial.print(' '); Serial.print(' '); Serial.print(nunchuk.zButton, DEC); // Z-Knopf Serial.print(' '); Serial.println(nunchuk.cButton, DEC); // C-Knopf delay (40); }
-
Hi, ich habe kein Metro Board. Ich habe gerade mit Chrizz telefoniert. Er wird mir die Funktion näher beschreiben. Denke dir auch was aus. Du kannst zwei Taster mit berücksichtigen. Ich muss noch die Reichweite testen. ich denke billiger geht es nicht. Ach ja, ich benutze das Board Ardurino Uno v3. wegen der Spannungs Stabilisierung und der 3.3V für den Wii Controller.
-
Hallo, ich habe heute den Controller bekommen und gleich zerlegt. Mit einer fertigen Lib konnte der Controller gleich ausgelesen werden. 4 Drähte, kein großer Aufwand. Morgen mache ich aus den Zahlenwerten ein PWM-Signal für ein Servo als Motorreglerersatz.

-
10€ für den Wii-Controller mit Empfänger!!! http://www.amazon.de/Wii-Nunchuk-kabellos-kompatibel-schwarz/dp/B003JH84FO/ref=sr_1_4?ie=UTF8&qid=1354444744&sr=8-4
-
Hi Benediktsamuel, könnte passen, aber für das selbe Geld habe ich ein http://arduino.cc/en/Main/ArduinoBoardUno Version V3 bekommen. Wenn es mit meinem Board läuft, sehe ich mir deinen Vorschlag näher an! Der Controller ist leider am Samstag nicht mitgekommen. Software Lib habe ich schon im Test. Ich werde erst mal einen Kabel-gebundenen nehmen müssen. Ich schätze Montage bekomme ich die Funkversion vom Controller geliefert.
-
Das Thema war zu spannend.... ich habe gerade einen BT-Nunchuck für 10€ gekauft.
-
Hallo Benediktsamuel, die Arbeit haben sich schon einige gemacht: http://arduino.cc/forum/index.php/topic,22056.135.html Ardruino Board habe ich, aber keinen wireless Wii Nunchuck. Mal sehen, ob ich mir einen leihen kann.....
-

Schaltung für Fernbedienung entwickeln?
barney antwortete auf Snickers's Thema in: Elektro-Skateboard Werkstatt
Hallo Snickers, da du keine Anforderung an die Fernbedienung spezifiziert hast, nenne ich hier einfach ein Modul, was ich selber schon eingesetzt habe. Wenn du die Programmierung nicht scheust, kannst du mit einem (2x) "Arduino Uno v3" Board und wenigen Drähten deine eigene FB basteln. Die Stromaufnahme ist batterienfreundlich. 9.6 kBit/s reichen für Zusatzfunktionen aus. Z.B. Zweistufen-Steuerung mit verschiedenen Kennlinien für den Poti-Geber (oder Turbo Taste), oder Boardbeleuchtung mit Ordnungskräfte-Notaus:D. http://www.conrad.de/ce/de/product/191498/Aurel-FM-Sendemodule-43392-MHz-Baustein-3-V Wälze mal deine Gedanken und beteilige uns! -
Schaltung für Fernbedienung entwickeln?
barney antwortete auf Snickers's Thema in: Elektro-Skateboard Werkstatt
Jo, für wenig Euro gib es Sende und Empfangsmodule mit einer Reichweite um die 10 Meter. 9V sind ausreichend. Kleiner als ein 9V Block. Kann ich dir morgen raussuchen. 433MHz und 8xx MHz. Unter 20 Euro. Welche Funktionen brauchst du? -
Gundlagen zur Motorsteuerung, Akku und zum motor selber
barney antwortete auf gruhu13's Thema in: Eigenbauten
Deswegen hab ich ein paar Fragen an euch: Ich suche gute Anfänger bis Fortgeschrittenen Erklärungen zu den Motoren und Akkus und Reglern, die man so im Board verbaut. Gibt es da was gutes im Internet? Könnt ihr mir Bücher empfehlen? -> Wie ist denn dein Wissensstand? Bienchen & Blümchen? Wie alt bist du, schulischer Hintergrund oder Bastler??? -> Wikipedia --> Brushless: http://de.wikipedia.org/wiki/B%C3%BCrstenloser_Gleichstrommotor --> Steller: http://de.wikipedia.org/wiki/Vierquadrantensteller -> Es gibt gute Modellbau Wikis -> http://www.mikrocontroller.net/ Wie schwer wird es, das Board zusammenzuschrauben - muss ich viele Einzelteile mit einlöten wie Kondensatoren etc. ? -> Nein, nicht viel zu löten. Wenn du dich mit einem Schraubendreher nicht umbringst oder die Augen ausstichst, sollte der Zusammenbau nicht schwer sein. Typische Hürden: 1. Motorhalterung und Ritzel -> Abhängigkeit von anderen, die dir was mit der CNC-Maschine fräsen. 2. Akkus/BMS -> Kannst du fertig konfektioniert kaufen oder löten. Den Rest solltest du selber einschätzen. Wie bekomm ich die Funkverbindung zum Controller hin (muss man da irgendwas extriges machen)? -> Wenn du eine einfache Modellbau Fernsteuerung verwendest, musst du nur der Motorsteuerung die 100% Marke anlernen. Wie funktioniert eigentlich die Motorbremse? -> Brushless & Brush: 1. Kurzschluss der Motorwicklung -> eleganter mittels PWM um die Bremsleistung steuern zu können. 2. Rückspeisung 3. DC-Bremse -> Die Bremsleistung von 1. lässt mit sinkender Geschwindigkeit nach. Durch aufschalten einer Gleichspannung wird der Motor auch im Stillstand "festgehalten". -
Hallo Chrizz, kannst du bitte die letzte Zeichnung uploaden, ich muss nur noch einige Sachen ins Raster bringen. Hallo sporcher, es fehlen nur noch 4 Bohrungen, dann kannst du gerne erstmal einen Halterung fräsen. Sollte sich diese bewähren, dann gehe ich von einer kleinen "Serie" aus. Was für Maschinen stehen dir denn zur Verfügung, hast du dir die Halterung schon mal angesehen? Ist da irgendetwas mit bei, was dir Probleme bereiten könnte? Es kommen noch Bohrungen mit Gewinde dazu! Anpassungen des Motorhalters: Ich habe Chrizz bei der Montage des Motors und Ritzel begleitet. Dabei ist mir aufgefallen, dass für die Montage der Zahnscheibe eine kleine Fräsung benötigt wird. Dann müssen noch diverse Bohrungen für die Fixierung des Motorhalters zum Schweißen berücksichtigt werden. Die Halterung konnte um 5mm gekürzt werden. Motor + Steuerung: Bis jetzt scheint die Kombination aus Motor und Steuerung eine gute Wahl gewesen zu sein. Der TOP-Speed reicht mir völlig aus:D Ich freue mich schon, dass ganze mit einem Headway Akku auszutesten. Da kommt im Gegensatz zu Chrizz Akku, Männermäßiger Strom aus der Leitung (ich poste mal ein Bild vom Sicherungshalter!).
-
Hallo, anbei ein neuer Motorhalter. Jetzt mm-genau durch Constrains und mit einer Skizze des Motors, sowie der Zahnscheiben mit 60 Zähnen am Rad und 24 bzw. 36 Zähnen am Motor. Der Motor kann verschoben werden, um Kollisionen zu erkennen. Das Langloch wurde erweitert und vereinfacht. Der Halter bietet jetzt einen besseren Motorschutz. Damit ihr eine 3-D Ansicht hin bekommt, müsst ihr die Sichtbarkeit der Tasche (Pocked) auf "true" umstellen. Leider musste der Halter 5mm größer werden. Dafür kommt man jetzt besser mit einem Imbus besser an das Motorritzel. Durch die Nutzung von Constrains in der Zeichnung müsst ihr nur noch die Zahlenwerte für Modifikationen anpassen. Weitere Vorschläge könnt ihr gerne zusenden.
-
Transistoren doppeln bei MOBO 800 Steuerung
barney antwortete auf Frank Do's Thema in: Elektro-Skateboard Werkstatt
Danke SAG, bei dieser Auflösung ist eine Übertemperaturabschaltung zu finden. R02 (oben links) ist dafür zuständig. @Frank: kannst du mir sagen, wo dieser auf der Platine zu finden ist? Du solltest aber nicht auf die Idee kommen, diese sinvolle und notwendige Abschaltung, durch auslöten von R02 zu deaktivieren. Und niemals ... (1941 – Wo bitte geht's nach Hollywood) D05 ist ungefähr 4-fach redundant vorhanden, nicht schlecht.... -
Transistoren doppeln bei MOBO 800 Steuerung
barney antwortete auf Frank Do's Thema in: Elektro-Skateboard Werkstatt
Lesen hilft: "Zum anderen hat die Freilaufdiode einen "glättenden" Effekt. Die Feldenergie im Motor baut sich während der Ausphase ab, die dabei enstehende Spannungspitze lässt den Strom durch die Freilaufdiode UND durch den Motor weiterfließen, dh der Motorstrom nimmt einen sägezahnförmigen Verlauf an (insofern die PWM-Frequenz nicht zu klein ist) und wird dadurch geglättet." http://www.mikrocontroller.net/articles/Motoransteuerung_mit_PWM http://de.wikipedia.org/wiki/Zweiquadrantensteller -
Transistoren doppeln bei MOBO 800 Steuerung
barney antwortete auf Frank Do's Thema in: Elektro-Skateboard Werkstatt
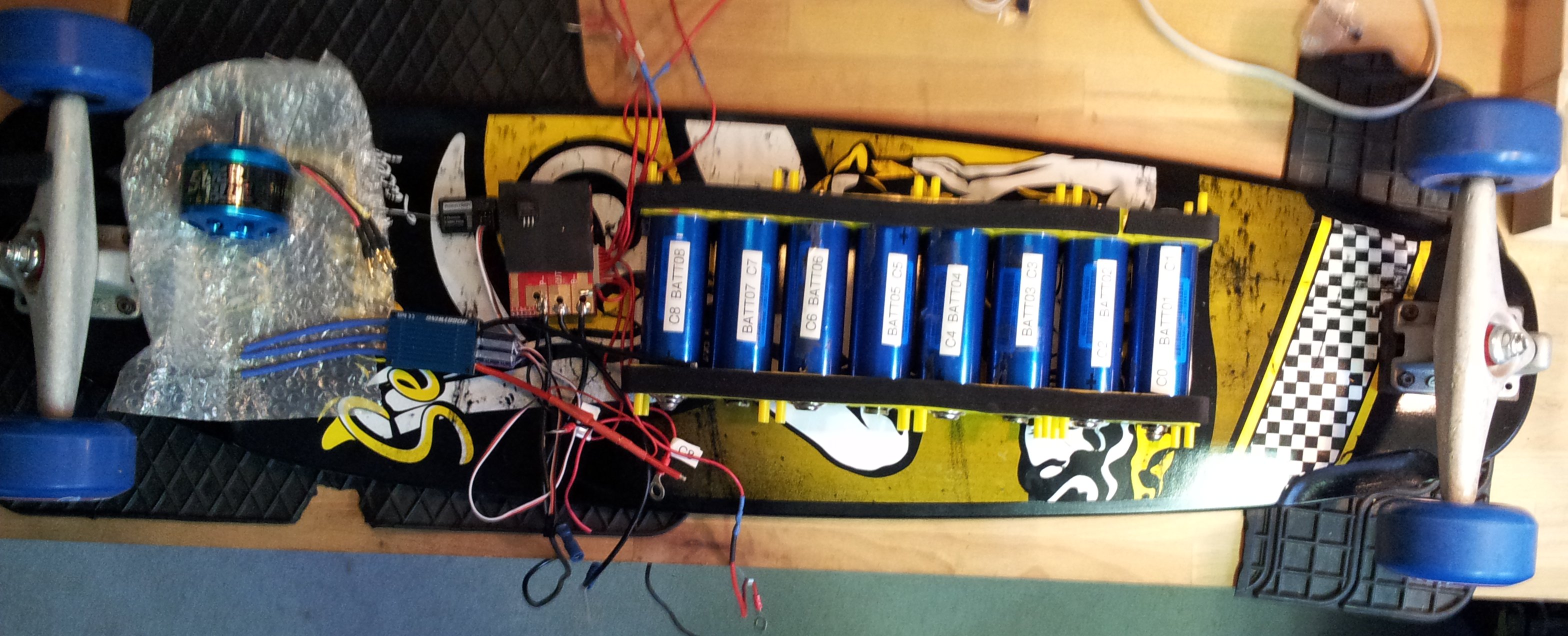
Moin Dr. Board, ja bei Spulen (Relais, Zugmagnete) ist schon klar. Ich war gerade in der falschen Annahme mit den Generatorbetrieb. Die Diode hilft wenigsten, wenn man rückwärts den Berg runter rollt. Zumal diese Dioden zumeist in den MOSFETs implementiert sind. (Ich sollte morgens keine Schaltpläne lesen!) Ich habe gestern mein Board zerlegt und dabei bemerkt, wie die verblödete Ansteuerung meinen (Brush) Motor im Freilauf abbremst. Naja, ist bald Geschichte, wenn ich mein neues Board wie in "OpenSource Board" umsetze. (siehe Bild) -
Hier eine erste Aufteilung der Boardfläche. Alle Bauteile finden großzügig einen Platz auf der Unterseite. Die Bodenfreiheit liegt derzeit bei 65mm. Jetzt muss ich bei Unrad noch einige Kleinteile kaufen, dann geht das Löten los. Für Messungen werde ich einen 50A Shunt fest einbauen und über eine Anschlussbuchse nach Außen legen. Leider habe ich die falschen Batterienhalter zugesendet bekommen, die Akkus benötigen alle eine O-Ring Dichtung, dann klemmen diese richtig fest im Halter. Bei Aldi habe ich das schwarze Schaumstoffdichtungsband gekauft. Damit rutschen die Akkus nicht über das Board und sitzen später besser im Doppelbügel. Vergessen: Das Gewicht beträgt ca. die Hälfte vom alten Board!
-
Transistoren doppeln bei MOBO 800 Steuerung
barney antwortete auf Frank Do's Thema in: Elektro-Skateboard Werkstatt
Hallo SAG, kannst du den Plan mit einer besseren Auflösung und als .jpg komprimiert hochladen? @Frank: Ich sehe auf den Schaltplan von SAG (kann sich mit einer besseren Auflösung noch ändern) keine thermische Überwachung in der Schaltung. Folgende Fragen habe ich: 1. Hat dein Akku eine thermische Überwachung oder Überstromabschaltung? 2. Bremsen deine Motoren, wenn du keine Beschleunigung anforderst, stark von selbst? Die Diode rechts neben den Motor macht mich stutzig! Grüße Barney -
Transistoren doppeln bei MOBO 800 Steuerung
barney antwortete auf Frank Do's Thema in: Elektro-Skateboard Werkstatt
Wenn sein zweiter Kreis mit der Sicherung eine Grätsche macht, hat er zum Bremsen immer noch die original Platine! Damit ist dieses Risiko minimiert worden. Wenn ich sein Akku sehe, gehe ich wie Wolf davon aus, dass die Steuerung zu recht abregelt. Wenn er den Shunt "brückt", wird ihn der Akku-BMS schon zurechtweisen. Viele Grüße Barney -
Transistoren doppeln bei MOBO 800 Steuerung
barney antwortete auf Frank Do's Thema in: Elektro-Skateboard Werkstatt
Mist jetzt sehe sein Akku! @Frank: An deiner Stelle wird ich es mit dem zweiten Motor oder der Stromerhöhung schön sein lassen. Ich denke das wird ein kurzer Spaß am Samstag werden.:devil: -
Transistoren doppeln bei MOBO 800 Steuerung
barney antwortete auf Frank Do's Thema in: Elektro-Skateboard Werkstatt
Ich kenne Franks Akku nicht! Mit BMS drin? Dann ist natürlich schlecht. Ich sehe mal im Fotoalbum nach... 800W sind natürlich die Dauerleistung, für die der Motor ausgelegt ist. Ich habe ja schon über mein Board geschrieben. Ich nutze für die Messung ein UT81B. Da sehe ich auch die Nadeln. Da ich mein Pack selbst gemacht habe, brauche ich mir wegen des Stromes nicht wirklich sorgen machen. (Sicherung im Notfall) Trotzdem sollte er einen eigenen Kreis für den zweiten Motor machen und nicht auf die original Leiterplatte gehen. Er braucht nur das Relais Einschaltsignal und das Gatesignal für die FETs. -
Transistoren doppeln bei MOBO 800 Steuerung
barney antwortete auf Frank Do's Thema in: Elektro-Skateboard Werkstatt
Was zeigt denn dein Wattsup an? Meine Zellen können wie gesagt 50A Dauerstrom ab. Wenn er mit 36V fährt, sollten bei 800W Leistungsaufnahme ca. 23A/Motor gezogen werden. Darum auch die Sicherung! Irgendwann sollte definiert Schluss sein. -
Transistoren doppeln bei MOBO 800 Steuerung
barney antwortete auf Frank Do's Thema in: Elektro-Skateboard Werkstatt
Hallo Frank, auch FETs wollen (Rauch-)zeichen setzen... Also zum Anschluss des FET-Boosters: Die zusätzlichen FETs sind ausschließlich für den zweiten Motor?! Wenn du diese mittels Sicherung und Relais direkt am Akku anschließt, kann deine original Steuerschaltung nicht wegen Überstrom meckern. Ich würde den Strom für den zweiten Motor nicht nach dem Hauptrelais abnehmen(!!!), dafür ist es nicht ausgelegt. Spendiere ein zweites Relais dafür! Auf die Strommessung kannst du aus meiner Sicht verzichten (außerdem ist es feige sowas zu machen ). Hol dir bei Unrad folgenden Sicherungshalter: "AIV Flachsicherungs-Halter Standard-Flachsicherungen 6 mm² Best.-Nr.: 854726 - 62 Spritzwassergeschützt" und eine Tüte voll mit Flach-Sicherungen! Wenn du die Schaltung so aufteilst, überlastest du nicht die Platine. -> Würdest du mir den FET-Typ verraten, den du da einsetzen wirst? -> Sind das verschiedene Motoren? -> Wenn du die typischen Headways-LiPos verwendest, sollten bei 20Ah ca. 100A Spitzenstrom möglich sein. Ich benutze die Headways mit 10Ah -> 50A Dauerlast möglich 100A Spitze für einige Sekunden. -
Transistoren doppeln bei MOBO 800 Steuerung
barney antwortete auf Frank Do's Thema in: Elektro-Skateboard Werkstatt
Was ist denn hinten bei den beiden Brücken unten angelötet? Immer noch, ich tippe auf die Brücken, da dort eine dünne Leiterbahn auf eine Filterschaltung geht. Echt ruhige Hand beim Fotografieren:D -
Transistoren doppeln bei MOBO 800 Steuerung
barney antwortete auf Frank Do's Thema in: Elektro-Skateboard Werkstatt
Für den Shunt sehe ich zwei Kandidaten, aber ich benötige ein besseres Bild von der Ober- und Unterseite der Leiterplatte. Kandidat Nr. 1. Die Doppeldrahtbrücke oben rechts, da geht eine kleine Leiterbahn zum IC ab. (Bitte einmal ohne Spiegelung aufnehmen) 2. Eher weniger: unterhalb von Q4 Wie gesagt ich benötige da bessere Bilder! Geschwindigkeitsabhängige Regelung? Machen die wirklich sowas? Ich sehe da kein Tachogenerator oder andere Schweinereien. Ich hätte folgende Fragen: * Benutzt du die original Akkus? * Hast du dir eine zweite Achse mit Motor besorgt? Der Motor sieht nach DC Brush aus. Die billige Methode zur Bestimmung der Leistungsfähigkeit deiner Akkus ist der direkte Anschluss an die Batterie. D.h. Board auf der Schräge antreten und mittels Handschalter oder Relais Spannung auf die Motoren geben. Dann würde ich erst über eine Modifikation der Ansteuerung nachdenken.