barney
-
Gesamte Inhalte
3.658 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
8
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von barney
-
An alle, die das probieren wollen: Ich sage ja schon: "Mann muss Opfer bringen" -> hier in diesem Fall Chrizz :devil: Ich habe die Programmierung auf dem Labortisch durchgeführt. Ich habe mir sehr viel Mühe gegeben, Sicherheitsfunktionen einzubauen. Aber ich gehe davon aus, dass es noch einige Service Packs geben wird. Als Motorsteuerung habe ich ein Servo für die Visualisierung des Ergebnis genommen. Dies ist nun mal keine Motorsteuerung! :devil: Also nicht an der dicht befahrenden Straße das Ganze ausprobieren, sondern in freier Umgebung. Ich konnte vor wenigen Tagen mal mein Motor fliegend aufbauen und damit testen. Dummerweise, meinte der Motorcontroller erst mal angelernt werden zu müssen, was gründlich schief ging. Wenn man das Programmiergerät nicht hat, wird mittels Hebelweg des Nunchuk die Programmierung durchgeführt. Dummerweise, habe ich den Nunchuk gesmooth. Damit kann ich keine Extrema sofort vorgeben und der Motor-Controller lernt nur Mist dabei. Also muss ich das Programm für die Programmierung (meines) des Motor-Controllers modifizieren, damit es klappt. Hier würde das Android Handy sehr helfen. Einfach den Ardurino in den Motor-Controller-Programming-Mode versetzen und gut ist. Viele Grüße Barney
-
Hi Sonni, Nein, ich verwende für mein Android Handy die App "GetBlue Demo" für die ersten Tests. Damit kann ich Telnet Like die Daten anzeigen lassen, oder welche an das Board versenden. Finde ich sehr komfortabel. Ich habe mir auch die Entwicklungsumgebung für Android schon installiert und erste Tests gemacht. Da dies aber nicht meine Welt ist, benötige ich Hilfe. Wie es der Zufall wollte, benötigt gerade ein Kumpel eine Arduino Programmierung, die ich gerade umsetze. Und dieser jeniger hat schon eine App für Andriod geschrieben. Er hat mir zugesagt, mich moralisch zu unterstützen. Trotzdem halte ich meinen Aufruf aufrecht, bei der Programmierung der Android App zu helfen. Da habe ich ein Problem. Das Handy, wo die App drauf läuft, ist auch das Handy, womit ich das ganze filmen könnte. So ne Art Henne Ei Situation. Bilder: Was hättest du denn gerne im Detail?
-
Hi Sonni, Bei diesem Board handelt es sich um ein China Clone. Leider werden sehr häufig die original Arduino Fotos verwendet. Daher kann ich dir nicht sagen, ob das Layout 100% kompatibel ist. Ich verwende sehr oft die Erweiterungs-Shields für Arduino und benötige damit die 100% Kompatibilität. Sieht so aus wie meiner, bloß in weiß. Die (Tages-)Preise schwanken zum Teil von 8 bis 12 € für das gleiche Produkt. Kann daher gut möglich sein, das du derzeit den Tiefstpreis gefunden hast. Ob der 100% kompatibel ist, kann ich durch Hand auflegen nicht sagen Da ich aber keine Besonderheiten abfrage, sondern den Wii-Standard verwende, wüsste ich nichts, was dagegen sprechen würde. :thumbsup: Probiere es aus, verarmen wirst du nicht dabei.
-
Hallo Bounce, diese Frage habe ich hier schon öfters gesehen und wurde hinreichend für brushless und brush beantwortet. Das Forum hier ist so interessant, das es gelesen werden kann und sollte. Nicht immer mit der Suchmaschine zuschlagen. Viele Grüße Barney
-
Hallo Dr. Board, hier habe ich eine fachlichen Dissens mit dir. Auch wenn es schon recht lange her ist (ca. 25 Jahre) habe ich bei Messungen von Stern- Dreiecksschaltungen (Synchronmotor sowie unbelasteter Asynchronmotor) keine Drehzahlveränderung durch die Umschaltung beobachten können. Bitte lese die einschlägige Fachliteratur! http://www.moeller.net/binary/schabu/SB0801D.pdf Heute Morgen habe ich extra meine Fachbücher aus dem Schrank geholt und folgendes bestätigt bekommen: Drei Methoden (Synchronmotor): 1. Polumschaltung 2. Frequenz 3. Getriebe -> habe ich bewusst weggelassen. Auch bei der Dahlanderschaltung bekommst du solch einen Faktor nicht hin. Eine Asynchronmotor betrachte ich mal hier nicht.
-
Zur Erinnerung wofür Stern- Dreieck-Schaltung gut ist: http://de.wikipedia.org/wiki/Stern-Dreieck-Schaltung Es gibt nur zwei Methoden bei den o.g. Motoren die Drehzahl zu verändern: 1. Polpaarumschaltung 2. Frequenzveränderung Ungeeignet ist: Spannungsveränderung zum Drehzahl verändern! Darum heißt der Synchronmotor auch Synchronmotor:D
-
Man kann durch das ändern der Bewicklungsart von Dreieck auf Stern die Drehzahl um den Faktor 1.7 verändern ??? Bei einer Synchron Maschine ??? Meinst du da was anderes?
-
"http://www.hobbyking.com/hobbyking/store/__25614__F3A_SK3_Competition_Series_28_Pole_Outrun ner.html ......wäre noch eine Variante" Versuche mal die Pole nachzuzählen! Entweder stimmen die Fotos nicht, oder die können nicht zählen! (oder ich) Ich zähle 14 Pole. ist mir bei der Suche nach 28 Poligen Motoren öfters Aufgefallen, das die Bilder oder die Angaben nicht stimmen. Ja, KV ist blöd, aber dich zwingt keiner 36V am Motor anzulegen. Wenn du die Nerven hast, ja neue Wicklung drauf und den Motor zähmen.
-
wie schon festgestellt, fehlt beim Radnaben Motor die Untersetzung. Alternativ kann auch die Pol Zahl erhöht werden. Die höchste Pol Zahl, die ich auf die schnelle gefunden habe ist dieser Motor: http://www.pichler.de/shop/catalog/product_info.php?cPath=36_136&products_id=1257 Der Aufbau des Motors scheint aus mehreren Gründen recht gut zu sein: 1. hohe Pol Zahl (mehr als doppelt so viele wie die typischen Motoren) 2. Es sieht so aus, als könnte man den statischen Anker von der Aufnahme lösen. 3. Die Anschlüsse liegen hinten. an der Flanschplatte Wenn sich der Motor einigermaßen zerlegen lässt, könnte die Motorglocke an der Frischluft betrieben werden. An der Motorglocke müsste das Rad direkt angekoppelt werden. Der Anker des Motors sitzt auf der Skate Achse, diese müsste auf das ehemalige Maß der Innenaufnahme rund gedreht werden. (Ich hoffe ich bin zu verstehen:p)
-
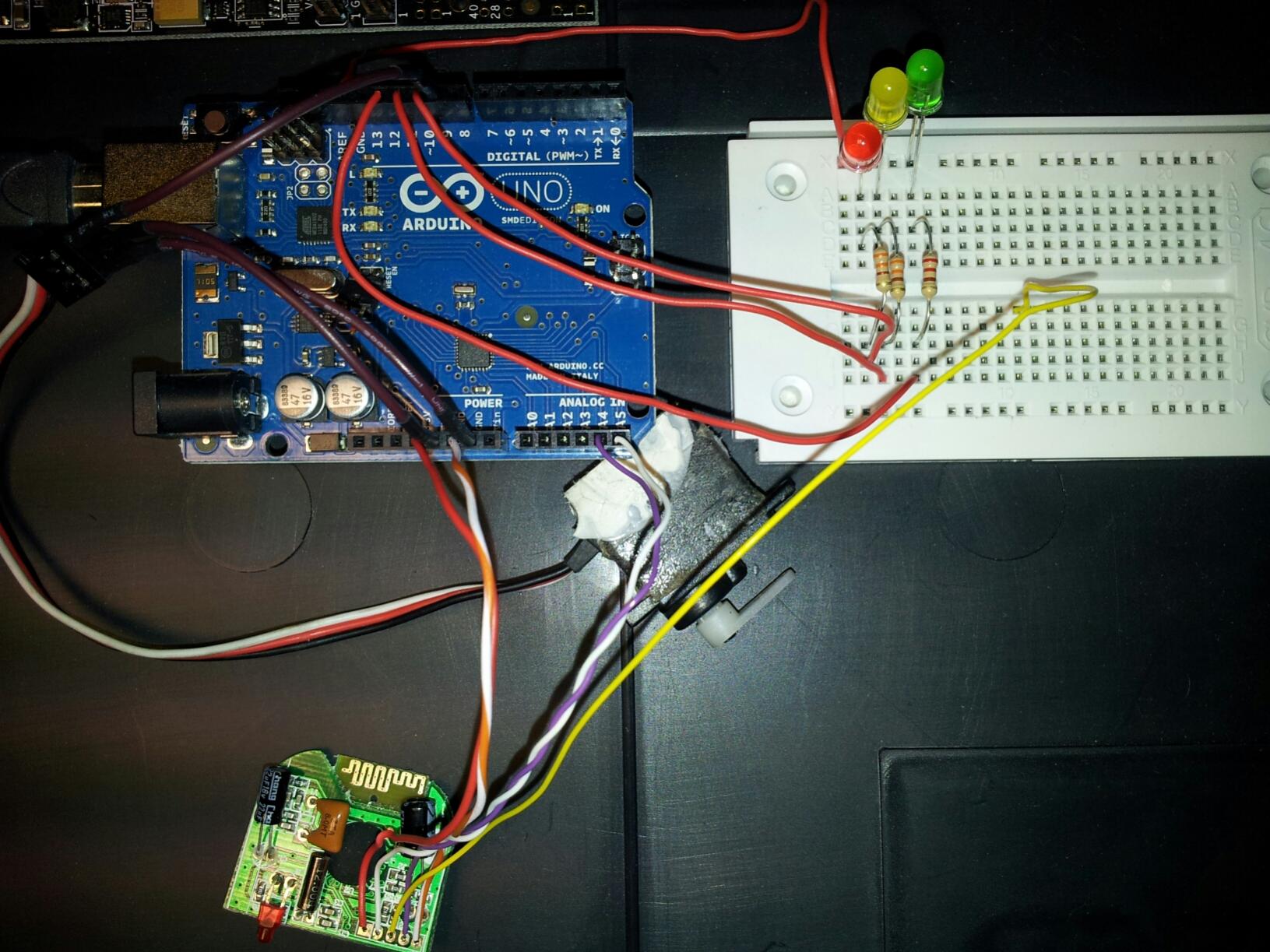
Hallo, anbei ein Foto vom Aufbau und eine erste Demo Version. Die Kopplung mit Handy funktioniert und das Board sendet auch Daten. Grüße Barney
-
Seit drei Tagen konnte ich mein Arduino + Bluetooth nicht richtig mit dem Handy verbinden. Foren, Doku und dann die Erleuchtung Das BT-Modul muss zweimal mit VDD versorgt werden. Arrrg (Scheinbar habe ich eine neue Version vom Modul) Jetzt steht die Verbindung zum Handy! Mal sehen, ob ich jetzt schneller vorankomme. Grüße Barney
-
Hallo, wie in der Überschrift zu erahnen ist, möchte ich die drei genannten Komponenten einsetzen. Nunchuk + Arduino ist erstmal gelöst. -> Jetzt kommt die Stufe II. Bluetooth-Modul habe ich geordert und werde es am Arduino anschließen. Jetzt meine Frage an alle: Wer spricht (schreibt) ggf. fließend Android? Ich habe keine wirkliche Lust auch noch Java lernen zu müssen. Folgende Funktionen möchte ich erst mal umsetzen: 1. Spannung (Akku) 2. Strom (Motor) 3. Temperaturanzeige (Akku) Später: 4. Leistungsanzeige (Wh / Ah) 5. Restleistung 6. Reichweiten Abschätzung 7. Graphen des Energieverbrauches in Abhängigkeit der Strecke. Wer kann mir dabei helfen?
-
Servo: Repräsentiert den Motorcontroller für einen schnellen Testaufbau. Anschluss ist ganz einfach: "-" -> Ardurino GND Anschluss "+" -> Ardurino +5V Anschluss "Impuls" -> Pin 9 Ardurino Und keiner hat es gemerkt + an - und rot an schwarz:D
-
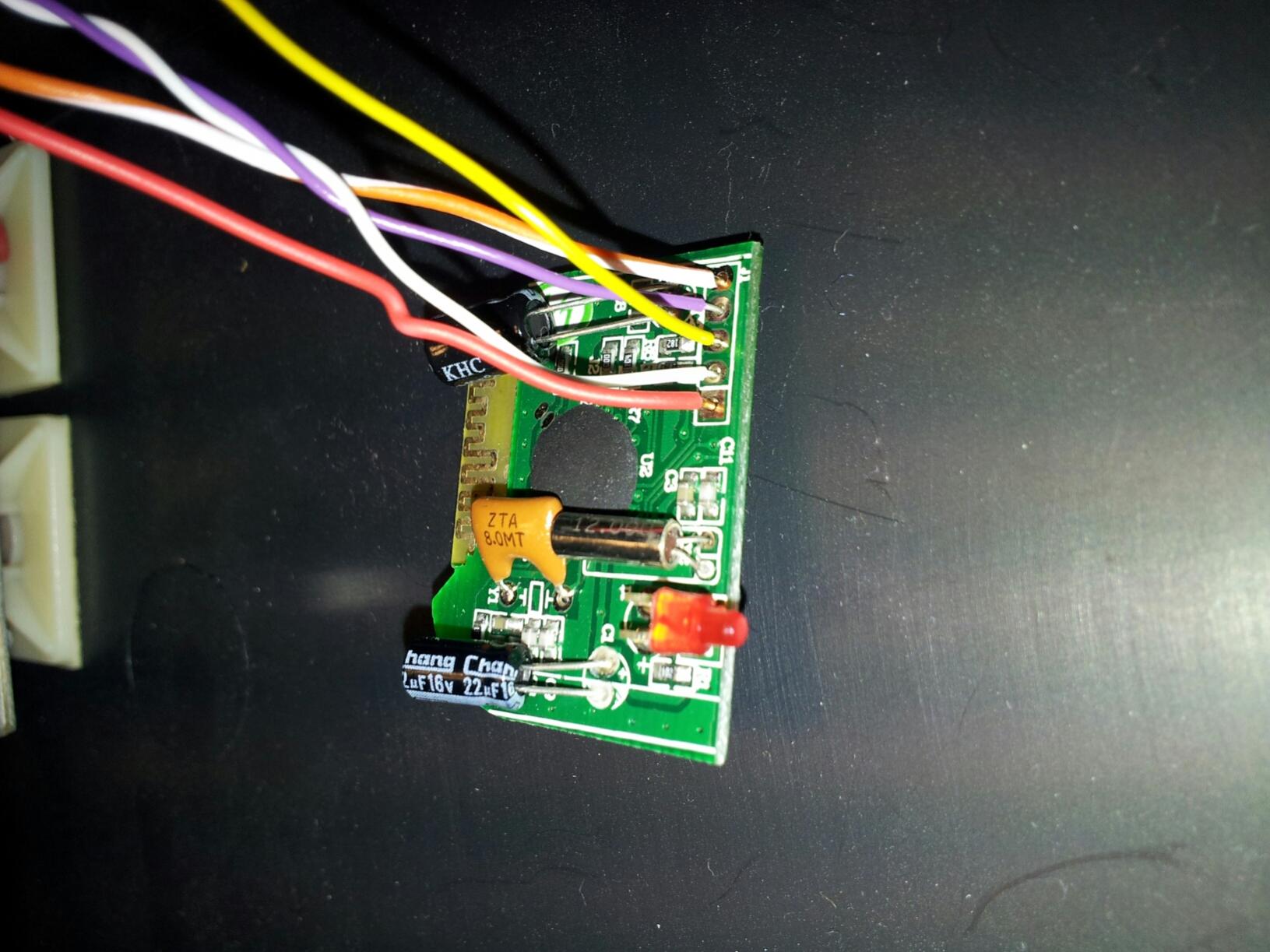
Zusammenfassung meiner Beiträge: Die hier beschriebene Steuerung ist für Boards ausgelegt, die auf glatten Beton energiesparend betrieben werden sollen. D.h. Beschleunigungswünsche werden durch Addition oder Subtraktion recht smooth angenommen. Für diejenigen, die durch das Gelände Powern wollen, ist diese Steuerung aus meiner Sicht so nicht zu gebrauchen. Die Änderung ist sehr Leicht. Einfach die if-Abfragen für die Addition / Subtraktion löschen und die Bremsabfrage leicht abändern. Dann wird der Hebelweg des Controllers direkt an die Motorsteuerung weitergeleitet. Stelle ich mir aber bei einem über 2000W Board mit diesem Nunchuck Hebelweg echt kriminell vor. Licht oder Hupe: Spezieller Wunsch von Bene: Es gibt zwei Ausgangspins am Arduino Board, die den entsprechenden Tast- oder Schaltausgang bereitstellen. --------------------------------------------------------------- Spezifikation: 1. Z-Taste + Hebel vorn -> beschleunigen (aufsummieren) 2. Z-Taste + Hebel hinten -> de-beschleunigen (subtrahieren) 3. Z-Taste + Hebel mitte -> Halten des letzten Geschwindigkeitsvorgabe 4. Z-Taste losgelassen -> Motor Freilauf 5. Z-Taste losgelassen + Hebel hinten -> bremsen (in der Stärke des Hebelweges) 6. C-Taste -> Hupe (getastet) / Licht (geschaltet) 7. Funkabriss -> Motor Freilauf 8. Controller wird nicht bewegt -> Motor Freilauf Alle Parameter sind als Variablen ausgelegt und können leicht angepasst werden. Es hat auch eine Lebend Erkennung. Fällt ein der Controller aus der Hand, wird nach ca. 1 Sekunde der Motor auf Leerlauf gestellt. Die Funk-Reichweite ist bei mir bei über 5m mit den u.g. Nunchuck Controller Bis auf das direkte Bremsen, sind alle Fahrfunktionen smooth ausgelegt. Lebend Erkennung (Spezifikation Punkt 8): Klingt blöd, ist es auch: Ich habe kein vernünftiges Kriterium gefunden, um einen Funkabriss, oder leere Batterie erkennen zu können. (Der Kabellose Controller war von Nintendo nicht geplant, also existieren auch keine entsprechende Register, die man auslesen könnte.) Der Trick ist die Erkennung eines statischen Beschleunigungswertes der X-Achse. Eine Routine zählt gleiche X-Achsen Werte auf. Wird ein Schwellwert (Trigger) überschritten, gehe ich davon aus, dass die Verbindung zwischen Nunchuck und Hand-Controller abgerissen ist. Das gleich gilt auch für die Verbindung zwischen dem Arduino-Board und dem Nunchuck Emfänger. Es ist mir bei Tests nicht gelungen, den Controller in der Hand (frei) so ruhig zu halten, dass der Trigger versehentlich ausgelöst wird. Wer meint, dass reicht nicht, kann weitere Achsen für die Detektion hinzufügen. --------------------------------------------------------------- Hardware kaufen: Ich habe die SMD-Version davon, aber bei einem Defekt ist der Mikrocontroller nicht austauschbar. Die Version hier unten hat ggf. einen gesockelten Mikrocontroller (ca. 22€): http://www.segor.de/#Q=Arduino%2520Uno%2520Rev.%25203 Auf die Versorgungsspannung achten: Input Voltage (limits) 6-20V Momentan versorge ich das Board über den USB Debug Anschluss. Achtung mit den Pins für die Hupe oder Licht. Die vertragen höchstens 50mA, also hier muss noch ein Mosfet oder Transistor nachgeschaltet werden, um den benötigten Strom zu treiben. Zum Testen kaufst du dir noch ein 10€ Servo und drei LEDs (und Widerstände 330Ohm). Nunchuck: zwischen 9-11€ Amazon: ASIN: B003JH84FO http://www.amazon.de/Wii-Nunchuk-kabellos-kompatibel-schwarz/dp/B003JH84FO/ref=sr_1_2?ie=UTF8&qid=1355298402&sr=8-2 Die Software kannst du schlicht bei: http://arduino.googlecode.com/files/arduino-1.0.2-windows.zip runter laden. Diverse Kleinteile: Schrumpfschlauch, Drähte, Pfostenstecker lang, Spannungsregler 5V ... --------------------------------------------------------------- Anpassen der ArduinoNunchuk Lib: Dazu benötigst du noch die Lib für den Nunchuck Controller: https://github.com/GabrielBianconi/ArduinoNunchuk/tree/master/ArduinoNunchuk in der ArduinoNunchuck.h Lib muss eine Zeile geändert werden: alt: Zeile 39: int neu: Zeile 39: uint8_t Diese Änderung ist nötig, um erkennen zu können, dass die Funkverbindung abgerissen ist! Die Lib in das Verzeichnis: arduino-1.0.2\libraries\Wii kopieren. Der Pfad "Wii" existiert nicht und muss erst angelegt werden! und dann erst arduino.exe startet, dann wird die Lib automatisch mit aufgenommen! --------------------------------------------------------------- Hardware basteln: Pinbelegung: Steht im Souce Code! Empfänger: Wenn ihr den o.g. Nunchuck kauft, dann das Gehäuse an den beiden vorderen Schlitzen vorsichtig aufbrechen. Die beiden Bilder "Empfänger Nunchuck oben/unten" zeigen den nackten Empfänger. Die vorhanden Drähte ggf. ablöten oder mit Pfostenstecker und Schrumpfschlauch versehen. Achtung Falle I: Die Pfuscher haben an "+" den schwarzen und an "-" den roten Draht angelötet! Achtung Falle II: Der Empfänger verträgt nur 3.3V. Also darauf achten, dass ihr den Empfänger am 3.3V Versorgungsausgang vom Arduino Board anschließt! Es werden nur vier Drähte benötigt: "+" -> VCC (3.3V!) "-" -> GND "Data" -> SDA "Clock" -> SCL Diesen Aufbau könnt ihr erst mal mit der ersten Demo von mir testen. Es sollten verschiedene Werte am PC angezeigt werden. Licht / Hupe: Alle LEDs haben eine gemeinsame Masse (GND). Die 330Ohm Widerstände an die LEDs ggf. anlöten und an die entsprechenden Ausgangspins des Boards stecken. rote LED -> Hupe gelbe LED -> Licht grüne LED -> Pairing steht Servo: Repräsentiert den Motorcontroller für einen schnellen Testaufbau. Anschluss ist ganz einfach: "+" -> Ardurino GND Anschluss "-" -> Ardurino +5V Anschluss "Impuls" -> Pin 9 Ardurino Den fünften Draht am Empfänger (gelb), den ihr seht, war ein Test und wird nicht mehr benötigt.

-
Danke Wolf, ich habe nie C gelernt oder gehabt. Eher Basic, Pascal, Assembler, Ada und was weis ich noch. Diese o.g. Sprachen kannst du im Programm als Stil erkennen. Hat aber auch einen Vorteil. Da ich kein C Spezialist bin, habe ich ein einfaches zu lesendes und simpel strukturiertes Programm geschrieben. Ich hoffe, dass sich C-Spezialisten nicht lachend zu Boden werfen. Wer sich besser damit auskennt, möge das ganze so anpassen, dass man es auch danach verstehen kann und nicht ein Studium der Informatik benötigt. Ggf. schaffe ich es heute noch die Doku für einen Nachbau zu liefern. Grüße Barney
-

eSkateboard vollständiger Eigenbau
barney antwortete auf elektroskater's Thema in: Elektro-Skateboard Werkstatt
Siehe: http://www.elektro-skateboard.de/forum/elektro-skateboard-werkstatt-48/wii-nunchuck-mit-ardruino-1806.php Grüße Barney -
eSkateboard vollständiger Eigenbau
barney antwortete auf elektroskater's Thema in: Elektro-Skateboard Werkstatt
Macht es euch leichter. Keinen Winkelsensor, sondern eine Leistungs- (Strom)Vorgabe für Motoren. Sollte der innen liegende Motor aufgrund des Kurvenradius mehr Leistung aufbringen sollen, wird aufgrund der Leistungssteuerung dieser Motor automatisch zurückgenommen. Grüße Barney -
Der Form halber das ganze unter GPL v3. Barney
-
Noch was wichtiges: in der ArduinoNunchuck.h Lib muss eine Zeile geändert werden: (Da es nicht meine Lib ist, kann ich sie hier nicht bereitstellen, sie kann legal verwendet werden (wirklich nichts böses)!) alt: Zeile 39: int neu: Zeile 39: uint8_t Die Lib in das Verzeichnis: arduino-1.0.2\libraries\Wii kopieren. Der Pfad "Wii" existiert nicht und muss erst angelegt werden! und dann erst arduino.exe startet, dann wird die Lib automatisch mit aufgenommen!
-
Ich habe die SMD-Version davon, aber bei einem Defekt ist der Mikrocontroller nicht austauschbar. Die Version hier unten hat ggf. einen gesockelten Mikrocontroller: http://www.segor.de/#Q=Arduino%2520Uno%2520Rev.%25203 Auf die Versorgungsspannung achten: Input Voltage (limits) 6-20V Momentan versorge ich das Board über den USB Debug Anschluss. Zum Testen kaufst du dir noch ein 10 € Servo und drei LEDs (und Widerstände 330 Ohm). Nunchuck: zwischen 9-11 € Amazon: ASIN: B003JH84FO http://www.amazon.de/Wii-Nunchuk-kabellos-kompatibel-schwarz/dp/B003JH84FO/ref=sr_1_2?ie=UTF8&qid=1355298402&sr=8-2 Die Software kannst du schlicht bei: http://arduino.googlecode.com/files/arduino-1.0.2-windows.zip runterladen. Dazu benötigst du noch die Lib für den Nunchuck Controller: https://github.com/GabrielBianconi/ArduinoNunchuk/tree/master/ArduinoNunchuk Zeichnung kommt später! Erklärung für die ersten Schritte folgen auch.
-
Die erste Version steht. Jetzt muss sich nur noch einer bereit erklären es auszuprobieren.:skep: Es hat auch eine Lebenserkennung. Fällt ein der Controller aus der Hand, wird nach ca. 1 Sekunde der Motor auf Leerlauf gestellt. Bis auf das direkte Bremsen, sind alle Fahrfunktionen smooth ausgelegt. Alle Funktionen konnten umgesetzt werden:D Spezifikation: 1. Z-Taste + Hebel vorn -> beschleunigen (aufsummieren) 2. Z-Taste + Hebel hinten -> de-beschleunigen (subtrahieren) 3. Z-Taste + Hebel mitte -> Halten des letzten Geschwindigkeitsvorgabe 4. Z-Taste losgelassen -> Motor Freilauf 5. Z-Taste losgelassen + Hebel hinten -> bremsen (in der Stärke des Hebelweges) 6. C-Taste -> Hupe (getastet) / Licht (geschaltet) 7. Funkabriss -> Motor Freilauf Bitte um Anregungen. Barney
-
Tach, Licht und Hupe funktionieren. Die Initialisierung macht mir zu schaffen. Derzeit benutze ich einen Interrupt für die Erkennung des Pairing. Scheinbar überrenne ich den Empfänger, wenn ich versuche die Verbindung immer und immer wieder zu etablieren. GGf. muss ich die Nunchuck Lib wechseln.
-
Sicherheitsfunktion: Z-Knopf für 1 Sekunde nicht gedrückt -> Bremse von 0% auf 100% ansteigend in 2 Sekunden:confused5: 0-100% ist unsinnig, wenn das Board unbelastet ist reichen sicher auch ca. 20% auch aus. Man wird auch nicht gleich vom Board geworfen.
-
Auf der Leiterplatte des Empfängers war noch ein Anschluss unbelegt. Dieser Anschluss verrät den Status des Pairing. Ist die Verbindung zwischen dem Controller und dem Empfänger nicht ausgehandelt, so wird 0V ausgegeben. Bei einem bestehenden Pairing liegen 3.3V an. Aber, erst nach 10 Sekunden geht dieses Signal erst wieder auf 0V zurück, wenn die Verbindung abgebrochen ist. Wie weit euer Board gekommen ist, könnt ihr dann selber ausrechnen;) Mal sehen....
-
Danke Michael, * Drehmoment und Unterspannung: Mein BMS und der Motorcontroller sind für die Unterspannung zuständig. *2 Meter Grenze: Ich habe noch kein Kriterium gefunden, dass mir die Feldstärke liefert. Da sehe ich ernste Probleme. * Controller nicht erkannt: Ich denke da habe ich was gefunden. Mal sehen ... * Hupe: oder Licht, wie man will. Ich hoffe ich kann in der nächsten Woche ein wenig loslegen. Erstmal fange ich mit ganz schlichten Sachen an. Grüße Barney