barney
-
Gesamte Inhalte
3.658 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
8
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von barney
-
Auch wenn das Thema echt unangenehm ist: Der war wirklich gut Arndt
-
Wattn, nur drei Berliner die kommen wollen. Kann ich bei einer sooooo großen Stadt einfach glauben! Wurde das ganze private Geld für den Flughafen ausgegeben? Also nochmal: nur drei Berliner in Berlin????
-
ja, ich habe auch keine Idee mehr! Der Nunchuk ist mit der Erwartung "Funkabriss erkennen" eine Sackgasse. Vielleicht ist es auch nur der Nunchuk von Logi3? Hat jemand ein anderes Modell, dass sich besser verhält? Z.B. Sleep Mode? VG Barney
-
hart eingeschaltet -> Nein, der Arduino kann jetzt mit einer PWM den Leistungsteil soft einschalten. Aber nicht mit Pin 13, sondern Pin 12. Pin 13 hat die Seuche. VG Barney
-
War auch positiv gemeint! Die Ideen, die ich hier sehe werden immer professioneller. Viele Grüße Barney
-
Mal wieder was praktisches: Das Arduino Board hat jetzt einen neuen Pin 13. Damit kann die Leistungselektronik eingeschaltet werden. Ich werde den Pin noch eine PWM verpassen, damit der Leistungsteil innerhalb von zwei Sekunden soft eingeschaltet wird. Also hier kein Relais anschließen, sondern MOSFETS! Derzeit wird der Pin einfach hart eingeschaltet! Strombegrenzung: Sonni hatte den unbändigen Wunsch, den Strom zu begrenzen (Schwitzer ) Es sind jetzt zwei Konstanten eingepflegt, die StromIshort und StromImax heißen. Ishort ist der maximale Kurzschlussstrom der fließen darf. Wird dieser erreicht, wird der Motorsteller in Neutralposition gesetzt. Ich wollte keine harte Strombegrenzung programmieren, deshalb setzt eine dynamische Strombegrenzung bei StromImax ein. Je höher StromImax überschritten wird, desto stärker wird der Motorsteller in % zurückgenommen. Ich muss das noch probefahren um zu testen, wie sich das ganze anfühlt. Wenn es klappt, habe ich meine letzte Sicherung durchgebrannt:p. Auch extreme Kräfte beim Beschleunigen sollten nicht mehr am Board auftreten. Wie sich das ganze bei einer Steigung verhält???? Mal sehen! VG Barney
-
Das alles hier nimmt langsam kranke Ausmaße an... Wann kommt der Elektrohubschrauber im Style von "Karlsson vom Dach" hier an?
-
Ich wollte einen eindeutigen Indikator finden, um eine Funkunterbrechung eindeutig zu erkennen. Seit zwei Tagen versuche ich mit einen Logic Analyzer geeignete Anschlüsse direkt an dem Funkmodul ausfindig zu machen. Leider scheint das verwendete Protokoll keinem Standard zu folgen. Muss ich also aufgeben.:mad: Dann ein Hoffnungsschimmer, ein Ausgang, der seine Frequenz verdoppelt, wenn die Verbindung steht. Timer0 des Atmel mit dem Ausgang verbunden und Keks gefreut. Ein eindeutiger Indikator:) Dann die zweite Pleite. Diese Erkennung habe ich in mein Hauptprogramm eingefügt UND - Mist geht nicht. Warum? Der Timer0 wird für die Zeitroutinen delay() verwendet und ist belegt. Die anderen zwei Timer habe ich auch schon in Verwendung. Also geht das auch nicht.:mad: Bleibt nur noch der: PlayStation Move Navigation-Controller Dieser Controller hat ein echtes BT-Modul intus und es gibt eine Lib für den Arduino dazu. Als i-Tüpfelchen kann sogar der Akkustatus abgefragt werden. Wenn das klappt, wird die Entwicklung ein eigenes Thema. VG Barney
-
Hallo Delas, bist du schon zu einer Erkenntnis gekommen? VG Barney
-

Zweiter Test der Evolve Reichweite am 28.5.2013 - Ergebnis: 42km!
barney antwortete auf Evolve Skateboards DE's Thema in: Evolve
Such mal im Forum nach den Ritzelrechner/Luftwiderstandsrechner. Dort sind alle Faktoren berücksichtigt. (Wirkungsgrad) VG Barney -
Suche mal im Forum nach Steves Problem. Wir hatten das schomal vor einige Wochen. VG Barney
-
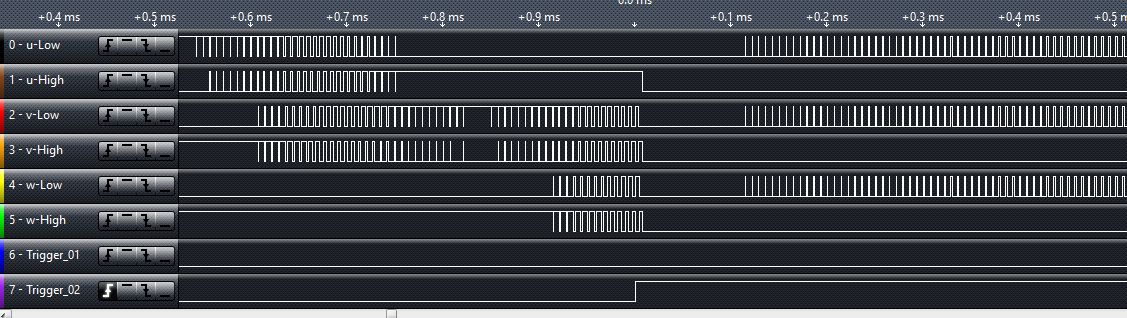
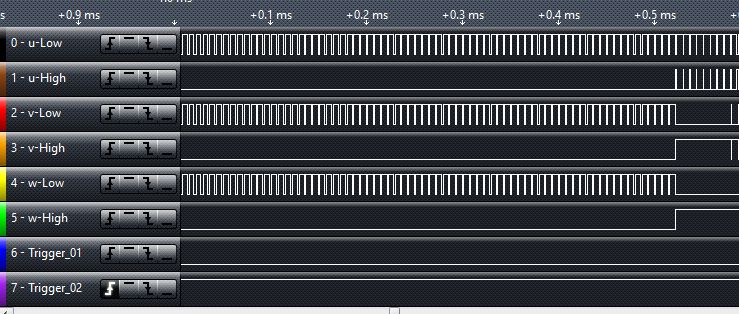
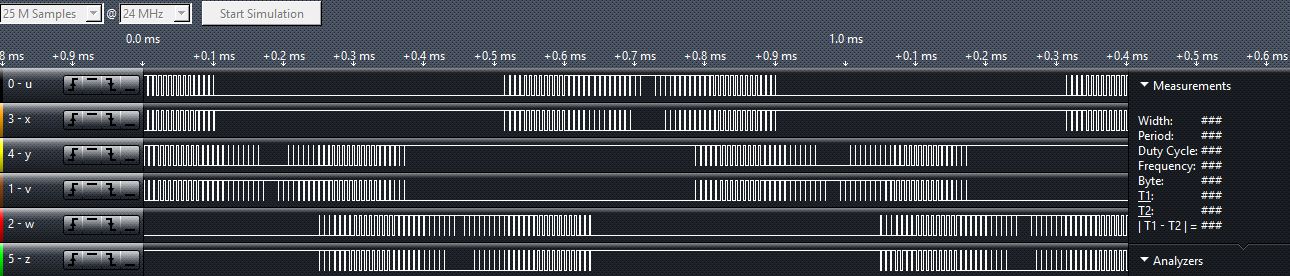
Was fürs Auge. Einmal der Übergang von der Fahrt in den Bremsmodus (Trigger_02). Danach der Übergang von der Bremse in das Fahrmuster. Jetzt noch die inverse Clarke-Transformation verstehen .... Mal sehen.... Ich finde die Bilder erklären sich selbst

-
Na super! :mad:
-
Die Wii Programmierung ist ja Heiß. Mal sehen wie er den Funkabriss löst.....
-
Halte ich auch persönlich für Irrsinn. Mir waren die ca. 33Km/h ausreichend.
-
Grundlage PWM-Bremse abgeschlossen. Die Werter der MOSFET High Dríver kann jetzt mit 0 überschrieben werden. Damit ist ein Bremsen mit den drei MOSFET Low Strang möglich. Mal sehen, wie die ISQ-Routine im Arduino Due funktioniert.....
-
Drücke dir die Daumen! VG Barney
-
Was habe ich bis jetzt geschafft: 1. Die Ansteuermuster für die 6 MOSFETs stehen. Theoretisch könnte bis jetzt ein 1200Hz Drehfeld erzeugt werden. 2. Das PWM-Muster hat eine sin(x) Tabelle mit 2° Auflösung. 3. Die Deadtime zum Schutz der MOSFETs ist auch einstellbar. 4. Die Brems PWM steht nur noch eine Zeile vor der theoretischen Lösung. Damit ist ein bremsen des Motors nahezu stufenlos möglich. Da ich keine Fremdspannung zum Bremsen verwende, hat das ganze auch noch ABS-Style. 5. Die PWM beträgt 140KHz -> Typisch sind eher 12KHz. Damit ist die hohe sin(x) Auflösung überhaupt möglich und ein Summen sollte nicht mehr zu hören sein. 6. Spannungsabsenkung für niedrige Drehzahlen realisiert. Ich muss noch eine Tabelle anlegen, die die Spannung in Abhängigkeit der Drehzahl für den verwendeten Motor beschreibt. Was Fehlt: 1. Leistungsstufe für Motor nicht vorhanden. 2. Keine PLL für die Drehzahlreglung 3. Keine Auswertung der Hall-Sensoren 4. Keine Strombegrenzung 5. Keine Drehzahlvorgabe momentan von außen vorhanden. 6. Spannungstabelle für Motor 7. ISR für Motorsteuerung Mit der Messung der Motordrehzahl muss ich mich völlig verhauen haben. Mein Motor dreht bei 35Km/h mit 5200U/min. -> Der Motor hat 12 Pole -> 12/3 = 4 Polsätze 5400/60*4 = 360Hz [(U/min)/min -> Hz] für das Drehfeld und nicht 640Hz wie ich (im Freilauf -> ich Idiot) gemessen habe. Die jetzigen 1200Hz werden sich noch deutlich absenken, da noch keine Regelung und Schutzschaltung vorhanden. Fazit: Der Arduino Due könnte klappen. VG Barney
-
Ich kann das schmerzlich nachvollziehen, ich hatte bergab vergessen, dass ich auch keine Bremse mehr habe. Und natürlich am Ende des Berges ein T-Stück als Straße..... Arbeite gerade an einer Bremse/Motorregler Viele Grüße barney
-
Hi, Meinst du einen einfachen DC-Motor oder einen Brushless Motor? Beim DC-Motor kannst du über die Spannung die Drehzahl verändern. Um die Spannung ohne große Verluste ändern zu können, ist eine PWM das Mittel der Wahl. Durch das Puls/Pausen-Verhältnis wird die effektive Spannung bestimmt. z.B. Puls 0% -> Spannung 0V, Puls 50% -> Spannung 50%, u.s.w. Timer-> Ich schätze, die Frage bezieht sich auf eine PWM. Du hast z.b. einen Zahler, der 16bit verarbeiten kann (0-65535). Dieser wird durch eine Taktquelle angesteuert. Wenn du den Zähler im Kreis zählen lässt und einen Schwellwert setzt, z.B. 32767 und die Logik so ist dass von 0 bis Schwellwert der Ausgang deiner PWM an ist, hast du auf dieser Weise eine PWM mit einem Tastverhältnis von 50% gebaut. Durch Verändern des Schwellwertes wird das Tastverhältnis geändert. VG Barney
-
-> Ja, aber.... Du hast nur einen begrenzten Strom zur Verfügung, der die 100Km/h auf den Boden der Tatsachen zurückbringt. Darum habe ich in den Ritzelrechner auch den Imax berücksichtigt! VG Barney
-
Lieber focasisimo, ich glaube die schlichte Zusammenfassung eines BLDC sprengt hier mal den Rahmen. Welche Grundkenntnisse sind bei dir vorhanden? Bist du in E-Technik fit? Hast du die PWM verstanden. Ahnst du, warum man die Spannung des Motors bei niedrigen Drehzahlen absenkst? Ich lese gerade das sehr interessante Datenblatt vom FCM8201. Die haben die Grundlagen für einen BLDC mit sin(u,v,w) sehr gut zusammengefasst. Viele Grüße Barney Scheue dich nicht einzelne (Fach-)Fragen zu stellen, mal sehen, ob wir dir helfen können!
-
Welche Werte sind übertrieben? Der Strom? Bei deiner KV-Zahl müsstest du dich zwischen zwei Werten entscheiden: 1. Die Übersetzung -> bei 24V hast du aufgrund der hohen KV-Zahl die Notwendigkeit einer starke Untersetzung! 2. Mit der Spannung heruntergehen. Da du aber eine bestimmte Leistung für die 40 Km/h benötigst, geht der Strom entsprechend hoch. -> finde ich beide Blöd! Die KV-Zahl scheint mir für die Anwendung zu hoch! Siehe oben. Im Idealfall teilen sich beide Motoren die Leistung, aber: 1. zwei getrennte Motorregler -> höherer Grundverbrauch, aufwändige Regelung, oder dir ist in Punkto Regelung alles egal, kann ja auch sein. 2. Jeder Motor benötigt einen Grundstrom / Erzeugt Grundverlust. Wenn ich an meinen C6453? keine Last anbringe, zieht der Motor 1.3A, damit er überhaupt sich dreht. Habe ich als Grundverlust beschrieben. -> Die Antwort liefert der Ritzelrechner! VG Barney
-
PID -> http://de.wikipedia.org/wiki/Regler Damit werden Vorlesungen gefüllt ESC -> ESC (Electronic Speed Control) Der Zusammenhang -> Ein Motorregler besteht aus wie im Namen gesagt, mindestens auch aus einer Regelstrecke. Was willst du denn genau wissen? VG Barney
-
Leider leider, Fairchild FCM8201 kann die Sinuskommutierung nur bis 320Hz. Gerade mein Longboard gemessen -> 650Hz, Mist. Mal sehen ob der Arduino Due mit 84MHz es kann? Barney