barney
-
Gesamte Inhalte
3.658 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
8
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von barney
-
Auweia, aufgrund eines Masseproblems habe ich ein angebliches Protokoll gesehen, welches nicht existiert:mad: Ich wollte schon Kontakt mit den Protokollspezialisten der NSA aufnehmen..... Nachdem ich die Kabel auf der Leiterplatte des Nunchuk Empfängers festgelötet und die Masse jetzt einwandfrei abgegriffen habe, bekomme ich jetzt auch logische Signale, die ein SPI Protokoll Verhalten aufweisen. Jetzt muss ich nur noch Bits jagen gehen und diese richtig zuordnen. Da die Platine recht gesprächig ist, muss ich sehr sehr viele Bits (Bytes) zuordnen. Was jetzt schon super optisch zu erkennen ist, wenn ich den Nunchuk ausschalte, ist das im Protokoll deutlich zu sehen. Aufgrund der vielen Bits werde ich versuchen, eine Arduino Routine zu schreiben, um mir die Arbeit zu erleichtern. Pinbelegung (Antenne oben, Platine von unten links nach rechts): 1 GND 2 Master Frame Sync (High-aktiv über gesamten Kommunikationsprozess) 3 Frame Sync (Low-aktiv über Teilfragmente der Kommunikation 4 Data 1 5 Clock (High-aktiv, wenn Daten ausgetauscht werden) 6 Frame Sync ? 7 Data 2 8 Vcc (3.6V) 9 Quarz-Anschluss (hier nichts anschließen, sonst funktioniert gar nichts) 10 Quarz-Anschluss (hier nichts anschließen, sonst funktioniert gar nichts) Die Daten werden mit 400 kHz Takt ausgetauscht. Passt also zum I2C-Protokoll. Mein Logik-Analyzer hat einen kleinen Schlag weg mit der Zeitmessung.... Der Takt dauert 1us,0.5us (an,aus). VG Barney
-
Hi Dr. Board, wie peinlich! Mach mich hier nicht zum Gutenberg. Ich habe das wirklich selbst analysiert. Wenn aber zwei verschiedene Personen zum gleichen Ergebnis kommen, ist aus wissenschaftlicher Sicht, das Ergebnis validiert. Ich werde versuchen, es bei Gelegenheit, mit einer Arduino ES-Skate Routine gut zu machen. VG Barney
-
Hi Dr. Board, danke für den Hinweis. Da wurde aber das Protokoll aber nicht vollständig dekodiert. VG Barney
-
Hi, Ich hatte schon vor Woche berichtet, das ich versuche den Empfänger des Nunchuk direkt auszulesen. Leider war da nicht ein Signalausgang sondern mindestens fünf. Ich konnte die Bitfolgen des Empfängers mit keiner, mir bekannten, Signalcodierung korrelieren. Gestern ist mir ein wieder ein altes Buch in die Hände gefallen, dass sich mit "Digitaler Modulation" auseinander setzt. Es wird sich um eine "vierstufige PSK" handeln. Die vier wichtigsten Ausgänge werden ein I/Q Signal führen. Also I,~I und Q, ~Q. Da es eine viertufige PSK ist, werden zwei Bits pro Schrittweite übertragen. Ich werde zeitnah nochmal einen Versuch starten, mehr Informationen aus dem Nunchuk herauskitzeln zu können. Einen Funkabriss konnte ich schon durch das Verhalten der vier Signalausgänge deutlich erkennen. Vielleicht benötige ich keinen BT-Nunchuk. VG Barney
-
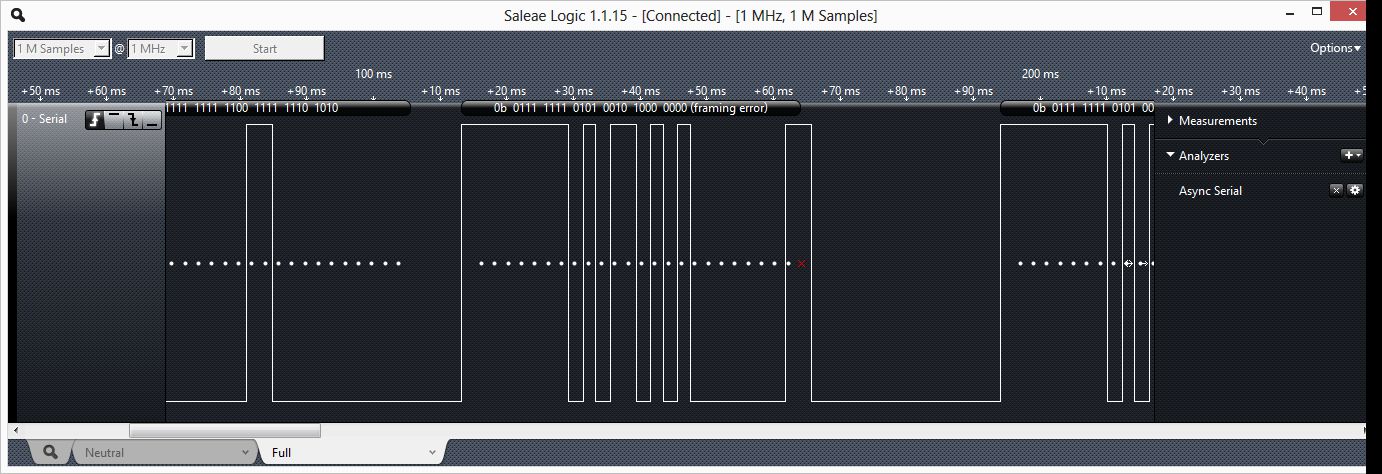
Hi, Sonni hat mir vor wenigen Tagen die Fernbedienung die o.g. Fernbedienung und eine Empfängerplatine zur Analyse übergeben. Folgendes konnte ich bis jetzt messen / herausbekommen: Empfänger: Betriebsspannung >7 V (LM78L06) bis ? (ich würde nicht über 15V gehen). Stromaufnahme um die 30mA Anschlüsse 4: wenn die Platine mit den Lötanschlüssen rechts unten liegt: +,GND,o.c.,GND Die Schaltung hat einen Digitalausgang mit Open Collector (o.c.). Es muss ein Pullup Widerstand gegen die positive Versorgungsspannung des Mikrocontroller verwendet werde. Alternativ kann auch der Mikrocontroller eigene Pullup aktiviert werden. Das Protokoll: Vorab: Der kleine dreistufen-Schalter in der FB kann für verschiedene Betriebsmodi min., mittlere oder maximale Beschleunigung eingestellt werden. Dies hat im digitalen Protokoll nur die Auswirkung, das den minimale Zahlenwert für die Beschleunigung verändert wird. zum Protokoll: proprietäres Serielle Protokoll mit 500 "Baud". Bestehend aus einem pos. Startbit - 8 Datenbit (invers) - 8 Sync bits - 8 Datenbits (nicht invers) und einem Stopp Bit (pos). Zwischen den Datenpaketen ist eine Ruhezeit von 28ms, jedes Bit hat eine Zeitdauer von 2ms. Das Poti in der FB wird mit 8bit aufgelöst. 00000000000000-siiiiiiiiccccccccnnnnnnnns00000000000000- Beispiel volle Beschleunigung ab Startbit s111111110-10110101-00000001s siiiiiiii-cccccccc-nnnnnnnns 0 Pause - optischer Trenner zur besseren Lesbarkeit s Start oder Stoppbit i inverser Wert des Potis als 8bit Wert (MSB first) c Synchronwort (8bit) Bitfolge -> 10110101 n direkter Wert des Potis (MSB first) Ermittelte Werte: Break 11000111 D199 Neutral 10111111 D191 Beschl 00000001 D001 (wenn Schalter in Max. Stellung) Beschl 00100010 D034 (wenn Schalter in Min. Stellung) Die Differenzierung zwischen Neutral und Break ist sehr gering. Ich weiss aber auch nicht, ob die FB keinen Defekt hat. VG Barney

-
Zu spät, habe ich schon gemacht. Bei einer Ansteuerung mit 1kHz, ist das Signal alles andere als Steilpflankig. Für meine Anwendung aber völlig O.K. Viel Freude damit. Ich habe es dir Gewidmet :thumbsup: VG Barney
-
O.K. das sehe ich auch so. Aber nochmal zum Strom. Ich fahre mit ca. 2-3A durchschnittlich! Ich glaube da sollte noch genug Reserve sein. Meine Spitzenströme betragen, wenn meine Hormone mit mir durchgehen, bis zu 48A! Selbst mit diesen Werten bin ich noch weit weit weg von den 90A (Dauerstrom). Ich sehe das damit recht locker. Das meinte/schrieb ich mit "keine steilen Schaltflanken aufweisen". Ich sehe mal nach, ob ich ein Modell des MOSFET finde und werde diesen dann für dich Simulieren. Meine Akkus haben eine Betriebsspannung von 26.X V! Siehe die Diagramme, die ich hier ins Forum gepostet habe. Ich verdeutliche es lieber für alle noch mal: "Ich hatte gerade diesen MOSFET in der Grappelkiste" Es gibt für diese Anwendung sicherlich noch preiswertere und besser angepassten MOSFET. Meine Schaltung wird sicher nicht die "Monte-Carlo-Simulation" vollständig überleben. Meine damit, es wird eine Kombinationen aus Temperatur, Strom, Spannung und Bauteilstreuung geben, die nicht gerade aufzeigt, dass der Aufbau optimal ist. Sag ich ja... Du kennst dich zufällig mit der Programmierung von BT-Modulen mit Piconet Funktion aus?! Ich hätte da was für dich! Ich verweise noch mal auf den Buchvorschlag "Bildungsauftrag". Da sind einige kleine Fehler, aber sonst für das Geld, recht informativ. Alternativ empfehle ich gerne "Einführung in die Analog- und Digitaltechnik" ISBN-10: 3823705059 ISBN-13: 978-3823705055 Ist mittlerweile auch günstig zu haben und ein super Grundlagenbuch. VG Barney
-
Nicht verschrecken!
-
Hi Nicolas, entschuldige, war aber nicht für dich. Lass dich verschreckten. VG Barney
-
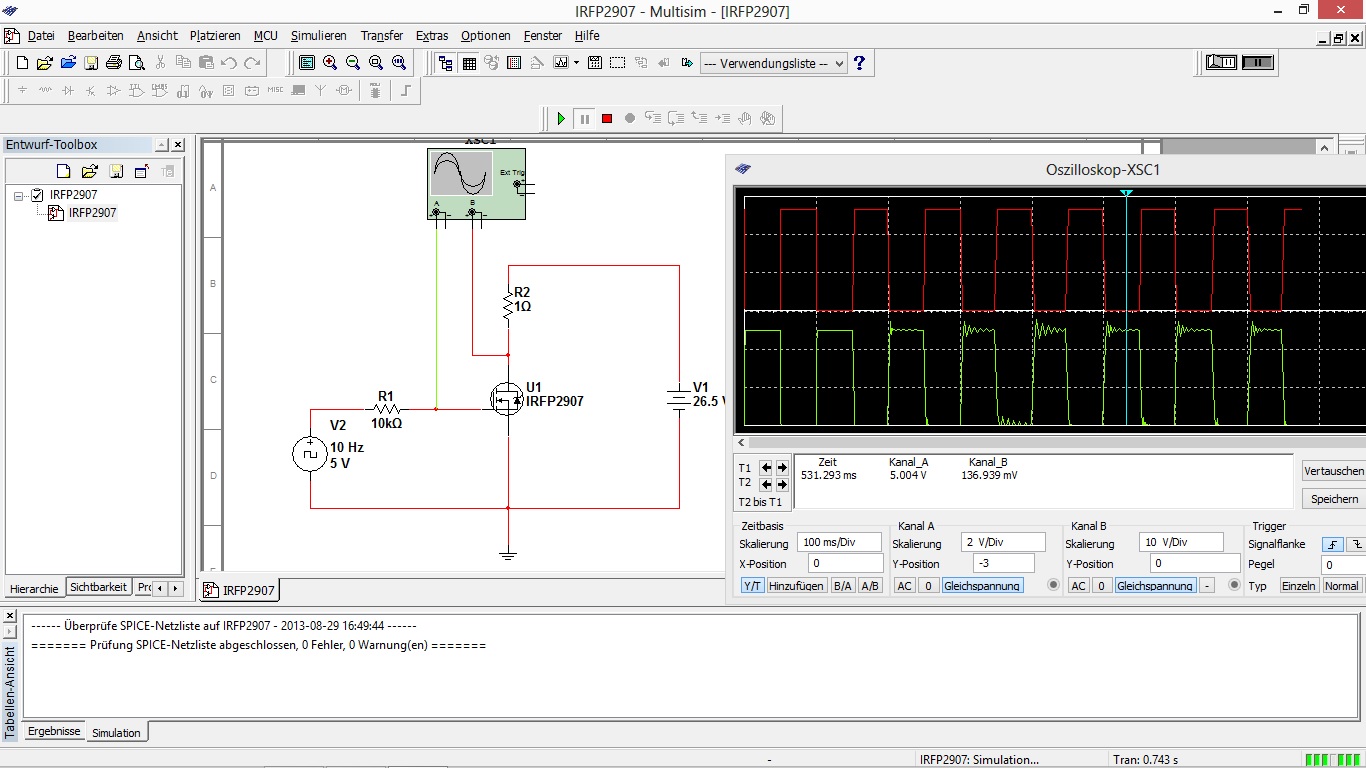
http://www.irf.com/product-info/datasheets/data/irfp2907.pdf Die 90A kann ich noch nicht nachvollziehen, siehe dir auch mal den Impulsstrom an. Mit einem kleinen Kühlkörper als Träger, konnte ich nicht die geringste Erwärmung ausmachen. Meine Lastströme sind hier als Diagramm im Forum! Ich habe nicht behauptet, das der MOSFET Typ, den ich verwende der geeignetste ist! Den hatte ich gerade in der Grappelkiste:D Ist halt noch ein Prototyp! Aber so was böses mache ich doch nicht , Ich steuere den MOSFET über den Arduino mit 5V an. Natürlich benutze ich einen 10k Gate Vorwiderstand zum Schutz des Ausgangspins. Jupp, Mein Aufbau steuert/schaltet aber den Masseanschluss. Ansonsten müsste ich einen "High Side" Driver verwenden. In der trockenen Simulation mittels PSPICE hast du sicherlich recht. Das ist aber rein akademisch. Hier kommen kleine parasitäre Induktivitäten dazu. Diese reichen für meine Anwendung völlig aus. Wenn Du es sauberer haben möchtest, ist ein in Reihe geschaltetes L nicht verkehrt. Laut Datenblatt könnte ich über 100A ansteuern. Ich glaube das sollte reichen! Und wie gesagt der wird nicht warm. Die PWM läuft in ca. 1 Sekunde durch. Die Schaltfrequenz habe ich nicht gemessen. Ich hatte leider keinen Timer mehr frei und habe deswegen eine sehr einfache Routine für eine PWM geschrieben: // Leistungselektronik mit PWM soft einschalten for(byte PSPWM=0; PSPWM<20; PSPWM++){ digitalWrite(Pin_PowerSwitch, LOW); // Leistungselektronik soft einschalten delay(20-PSPWM); // Pause bis low wird immer laenger digitalWrite(Pin_PowerSwitch, HIGH); // Leistungselektronik an delay(PSPWM); } digitalWrite(Pin_PowerSwitch, HIGH); // Leistungselektronik dauerhaft an } Die suboptimale Ansteuerung wird ihren Anteil tragen, das der MOSFET keine steilen Schaltflanken aufweisen wird und damit auch ein Kondensator mittels PWM ein Aufladen verträgt. Nee, sehe ich sportlich. "Das Bessere ist der Feind des Guten" VG Barney
-
Ist denn der Schalter als das jetzige Problem identifiziert? Bei einem Relais ist es ganz einfach. Da wo der Schalter ist, kommen die Leistungskontakte des Relais-Ausgang hin. Und das Relais wird mit einem Schalter, wie Du momentan verwendest ein/- ausgeschaltet. Hier kann die Herausforderung dazukommen, das ein typisches KFZ-Relais nur 12-15V verträgt. Es gibt auch LKW-Varianten mit 24-30V. Hier ein Wahlloses Beispiel: http://www.amazon.de/KFZ-Relais-Wechslerkontakt-150A-100A/dp/B00BKYV1B2/ref=pd_sim_sbs_diy_4 VG Barney
-
Der besagte MOSFET "IRFP2907" kostet 5€. Das Arduino Board schaltet auch soft per PWM ein!
-
Hi Nicolas, verdrehe jetzt bitte nicht die Augen, aber Du hast nachgefragt :devil: Nehmen wir mal ganz willkürlich folgenden Schalter als Beispiel: Arcolectric Leucht-Wippenschalter 250 V/AC 16 A C1350VBAAF 2 x Ein/Aus (16 (4) A / 250 V/AC) Dieser Schalter kann bis zu 16A schalten! nein, falsch: bis zu 16A AC halten bei bis zu 250V/AC. Da ist leider noch eine kleine 4! Dieser Wert gibt den DC-Wert an. Da ich faul bin, kopiere ich folgende mögliche Begründung: "Somebody more knowledgeable can comment; but my understanding is that the DC rating much lower because when the switch is operated to break DC current it is opening a steady state current of 4 amps. With DC also it is important whether the circuit is inductive/capacitive or purely resistive. When opening an AC circuit the current (assuming say a sine wave) is rising then falling to zero twice each AC cycle. Thus ensuring, for example in the case of say 60 hertz, that the current will be 'quenched' (i.e. at zero) within a maximum of one 120th of one second. Thus much less chance of continuing/creating a spark or arcing of the contacts! Also you will rarely see 'Spark Quench' circuitry on anything but DC contacts/switches, for the same reason. So even though a switch might be able to 'carry' 16 amps through it without heating up the contacts etc. when it comes to breaking the circuit DC is very different to AC." <- Und da liegt der Kernsatz! Und um das noch komplizierter zu machen gibt es für den Einschaltmoment den Begriff "Inrush Current". Die "High Inrush" Version des o.g. Schalter verträgt bis zu 150A. (AC/DC?) Und da du genauso gemein zu deinem Schalter bist wie viele hier, wirst du den BLC (und damit seine Kondensatoren) ohne Vorwiderstand schalten. Wenn Du auch noch "Männer Akkus" verwendest (also nicht die Typen, mit den Chrizz fährt), kommt beim Einschalten ein wirklich sehr hoher "Inrush Current" Impuls zustande. Der schlichte Tot eines jeden Schalters :mad: Falls Du dich jetzt fragst, "wie macht Barney das denn nur?" Isch abe garkein Schalter (angelehntes Zitat aus der Werbung). Bei mir wird mittels Arduino ein 209A Power-MOSFET mittels PWM angesteuert. Somit verwende ich einen kleinen Schalter, der nur noch den Arduino ansteuert. (Ein KFZ-Relais geht auch ) Viele Grüße Barney
-
Du kannst die Spannung über den Schalter messen und dann fahren. Die Spannung sollte gegen 0V streben. Fällt dein Board beim Fahren aus und Du misst eine Spannung über den Schalter, dann ist dieser tot.
-
Da hätte ich mal deinen Schalter in Verdacht. Oft werden Schalter eingesetzt, die nicht den Einschaltstrom der BlC Kondesatoren vertragen. Dann verzundern die Schaltkontakte.
-
Was heißt denn ganz genau "schaltet sich ab"?
-
Hast du ein Messgerät?
-
Um die Argumente von Chrizz zu erweitern, 1. Der Motor ist unnötig schwer 2. Der Grundstromverbrauch ist höher als nötig 3. Die Kräfte, die auf dem Riemen wirken können, können deutlich größer ausfallen. 4. Der Platzbedarf ist höher und kann ein enges Lenken einschränken. Durch meine Messungen, würde ich bei einem Neuaufbau sogar einen "kleineren" Motor nehmen. Und mit Hall-Sensoren für eine bessere Motoransteuerung. Das Singen des Motors bekomme ich in wenigen Lastfällen auch hin. Hier würden die Hall-Sensoren sicherlich helfen. Nun steht auf der Webseite, dass die Lager verbessert wurde. Mit / durch was? Bessere Kugellager? VG Barney
-
Beileid, so ein kurzes Vergnügen. Wer ist Bruno? Sende doch mal einen Link vom Motor. 38 Km/h? Trägst du Schützer? Bist du Organspender? Ich finde die Werte klingen immer so lässig. Aber knapp 40 Km/h ist beim Unfall schon ein nettes "Ditschen". Aber Youtube verlang nach neues "Fail" Material :devil: VG Barney
-
Lange war es mit der Curie-Temperatur her... http://www.supermagnete.de/faq/Wie-heiss-durfen-Magnete-werden Leider bekommt man zu den Motoren keine Datenblätter. Das Drehmoment, maximale Drehzahl, .. usw. bleiben ein Geheimnis des Herstellers. Ab was will man für 50-60€ auch meckern?
-
Hi Beatbuzzer, damit sind wir uns einig und der Weltfriede ist wieder hergestellt. VG Barney
-
Hallo Kai, das sind ja Werte die freude machen. Nebenbei kann er dann alle Telemetrischen Daten der E Skates verarbeiten und noch als Gameserver dienen. Die Seti Leute freuen sich sicher über die zusätzliche Rechenleistung..... Super und vielen Dank Barney
-
Ich habe bei ca. 25V zeitweise eine Leistung von bis zu 1200W am Akku gemessen. Wie in den Temperaturkurven zu sehen ist, erwärmt sich dabei der Motor sehr schnell. Man sollte sich auch mal den Lieferumfang der Motoren ansehen. Die Luftschraubenhalterung weist darauf hin, dass der Motor im Flugmodellbau eingesetzt werden soll. Nicht für Skates. Dort bekommt er auch im Hubschrauber einen nicht unerheblichen Anteil von Kühlluft ab. Was machen wir? Verstecken ihn hinter der Motorabdeckung und lassen ihn nur von den Resten des Fahrtwindes partizipieren. Das ist erbärmlich. Nicht umsonst hat sich das Marketing P.M.P.O. einfallen lassen. VG Barney
-
Nein, durch das Einstellen des Phasenwinkels beabsichtigt man das Drehmoment des Motor positiv zu beeinflussen. Als unerwünschter Nebeneffekt wird, aufgrund deiner o.g. Argumentation, der Wirkungsgrad, ungewollt herabgesetzt. Ich wehre mich gegen die bewusste Einstellung des Wirkungsgrades. Einstellen -oder erreichen möchte man was anderes. VG Barney
-
Nee, den Wirkungsgrad auf keinen Fall.