barney
-
Gesamte Inhalte
3.658 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
8
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von barney
-
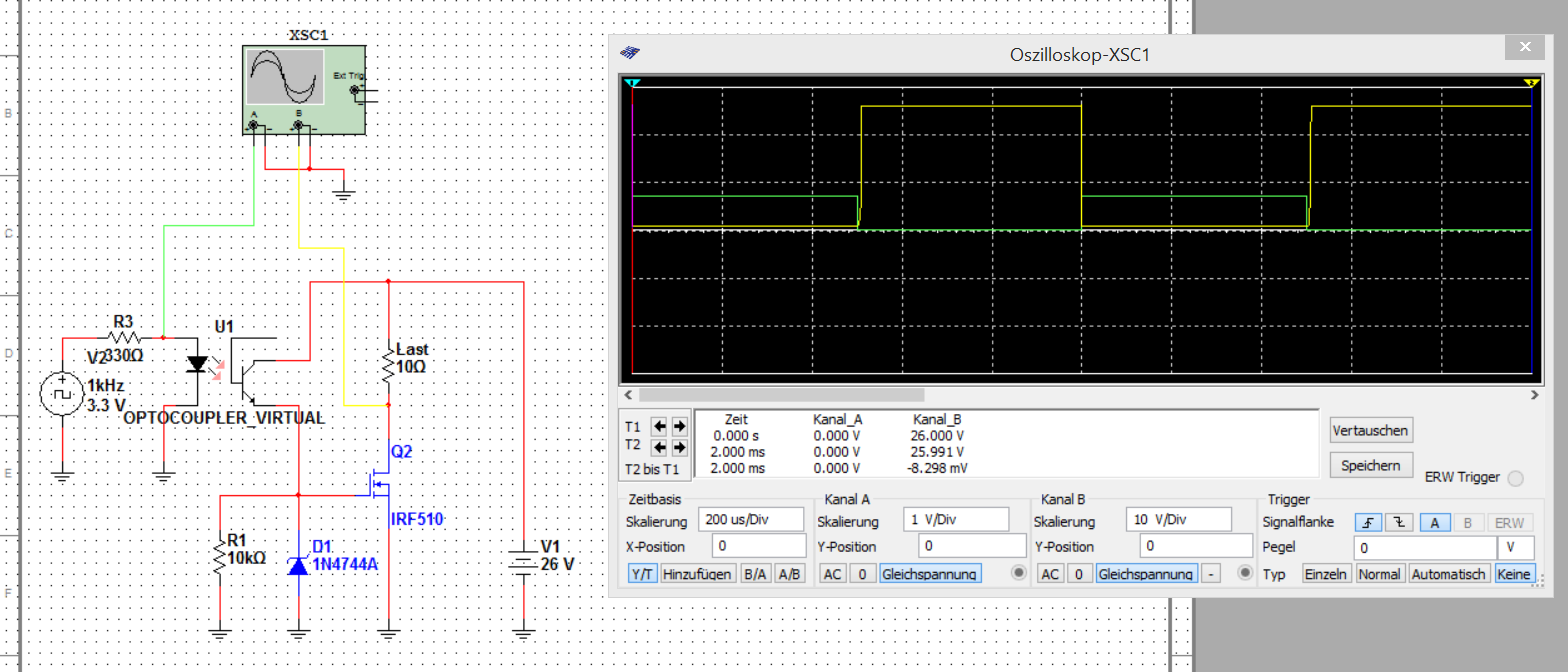
Anbei die Schaltung! Der IRF510 ist nur Stellvertreter für den Leistungs-MOSFET!. Der Virtuelle Optokoppler hat drei Anschlüsse am Ausgang, den an der Basis kannst Du ignorieren. Der Rest sollte so passen. 15V Ugs sind durch die Z-Diode sicher gestellt. Der Optokoppler wird mit 10mA angesteuert. Du musst natürlich im Datenblatt nachsehen, ob das dann zu deinen passen wird. VG Barney

-
Mach es dir doch ganz einfach: Ein Optokoppler. Am Leistungs-MOSFET von Gate ein 10k Widerstand und eine 15V Z-Diode Parallel gegen GND. von U+ (26V) gegen Gate die Optokopler Ausgang. Der Optokoppler Eingang mit 330 Ohm am Teensy gegen GND. Nichts ist invertiert und das Potential ist entkoppelt! Und wenn der Teensy aus ist, ist auch die Schaltung aus.
-
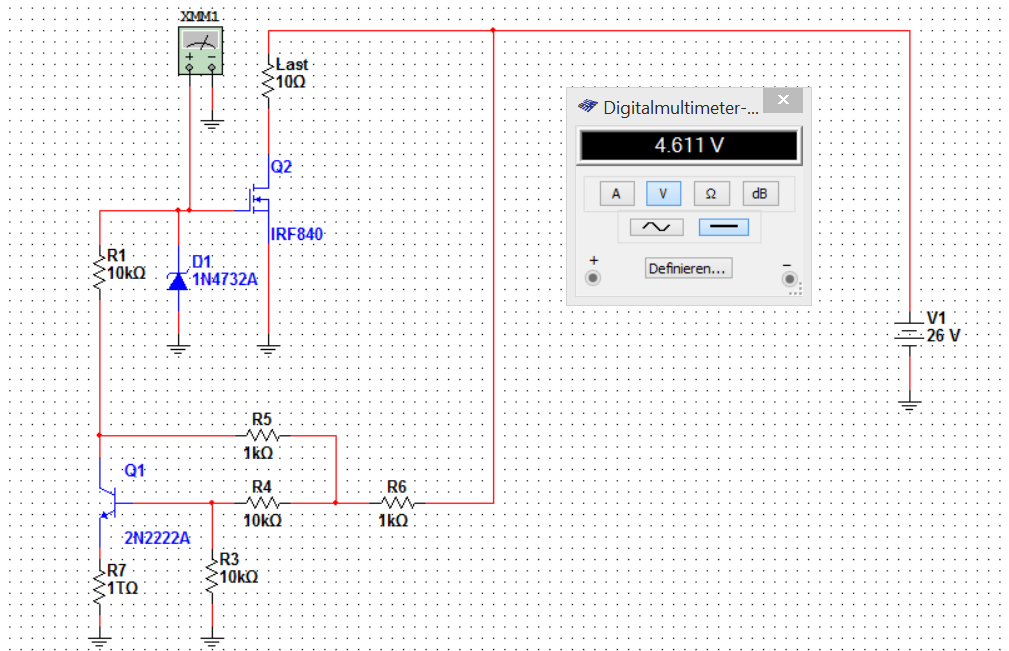
Wie erwartet, wenn Teensy aus, Schaltung teilweise an.
-
Die Z-Diode stand nicht in Frage, sondern der Wert! 15V hätte ich auch für sinvoll gehalten. Der Aufbau für den Leistungstransistor: Ich würde mal schnell abschätzen, wenn der Mikrocontroller aus ist, also hochohmig, dass sich die Stromversorgung einschaltet. Simulation kommt nachher.
-
Ich hatte mich schon gewundert. Aber für eine Hupe oder Licht gehe ich im Bezug auf dem Ladestrom entspannter ran. Ich bin gespannt. ...
-
Ich fange mal bei den IRLU2905 an: 10K am Source sollten durch Drahtbrücken ausgetauscht werden. Du willst ja keine Konstantstromquelle bauen. Die sollten durchschalten. Dafür würde ich am Gate 1-10k Ohm vorschalten. mit 3.3V wird das eh knapp, laut Datenblatt solltest du nicht mehr als 20A Last anschalten. Deinen Low Side Driver werde ich morgen simulieren und was dazu schreiben. die Z-Diode, sie steht doch auf dem Kopf und Warum 5V? VG Barney
-
Hallo Dude, ich habe gestern die aktuelle Version überarbeitet. Jetzt stimmt auch die Berechnung der Messwerte wieder. Noch einige Tests und du bekommst die Version 3.3p4
-
Servos naja, also zum Basteln O.K. Der ESC bekommt sowieso keine 5V zu sehen. Bei den 70HV oder bauähnlichen Typen sitzt ein Optokoppler im ESC. Die +5V müssen nicht angeschlossen werden. Du musst es nur schaffen den Optokoppler ausreichend anzusteuern. Bei den BEC ESC besteht die Gefahr, dass die zu hohe BEC-Spannung deinen Teensy killen würde. Will damit sagen, ich würde den + Anschluss vom Motorsteller nicht anschließen. Nur GND!
-
Die Schaltung am Emitter des Transistors ist seltsam. Das muss ich mir in Ruhe ansehen. So was kenne ich nur aus der HF. Warum hast du einen 3.3V und 5.0V Regler eingeplant? 3.3V: 1. Die DS18B20 funktionieren ab 3.0V 2. Der ACS756-050 kann auch mit 3.3V arbeiten. Außerdem würde der analoge Eingang des Teensy über 3.3V nicht lange mitspielen. Nur die digitalen Eingänge sind 5V tolerant. Nicht die analogen Eingänge! Hier nur 3.3V Umax!!! MOSFET Ansteuerung: Die 5.0V waren schon mehr als knapp. Ich würde eher 12-15V anstreben. Dann ist der MOSFET satt durchgesteuert und hat sein niedrigstes Ron. Wenn ich mich richtig erinnere liegt die Grenze für Ugs bei 20V. VG Barney
-
Ich wollte eine Zeichnung abliefern, aber ich bin faul: -> http://www.mikrocontroller.net/topic/267566 -> hier der Schaltplan ganz oben: http://www.mikrocontroller.net/topic/268306#new CS benötigt keinen Widerstand wie in 267566. Datenblatt: http://www.irf.com/product-info/datasheets/data/ir2127.pdf Die CS-Beschaltung weglassen und CS auf GND.
-
Wer misst, misst Mist http://forum.pjrc.com/threads/25725-Teensy-3-1-AnalogWrite-problem-with-slow-PWM-frequency?p=48331&posted=1#post48331 Ich dachte, da wäre ein Bug im Teensy 3.1, aber manchmal hält ein die Messtechnik zum Narren. :mad:
-
Ich kann dir zu mindestens sagen, dass ich mit meinen durch die Gegend fahre! Ich schätze die Beiträge von Beatbuzzer sehr, so dass nichts gegen seinen Vorschlag einzuwenden wäre. Ist die Beschaltung wie im Datenblatt, nur dass ich nicht den High-Side Treiber beschalten würde. Den Eingang der High-Side sollte auf GND festgelegt werden. Ich werde bei Gelegenheit eine Skizze machen. Vielen Dank für das Angebot, aber die Post kann keine Anonyme Pakete versenden. :skep:
-
Da du ohne Last testest: Hast du schon den allseits beliebten Lederhandschuh Test gemacht?
-
Ich sehe / höre momentan da kein Problem. Dein Motorcontroller scheint nicht optimal kalibriert zu sein. Die letzten 30% vom Controller scheinen verschenkt zu sein. Wie schon geschrieben, bei mir knarzt der Motor auch im unteren Drehzahlbereich.
-
Hier wäre es hilfreich gewesen, zu sehen, wie du mit deinem Controller den Motor ansteuerst. Ich kann nur raten, was du gemacht hast. Das Knacken in den unteren Drehzahlen ist der Sensorlosigkeit geschuldet. Der Motorcontroller erkennt aufgrund der geringen Rückspannung die Motorlage nicht richtig. So klingt es bei mir auch. Ein langsames, linares Durchbeschleunigen wäre besser gewesen.
-
1. Anderen Motor 2. Spannungslos: Widerstandsprüfung der Ausgänge 3. mit Spannung: drei Lastwiderstände und Oszilloskop 4. mit Spannung: Spannung an den drei Ausgängen messen, ob da eine statische Spannung steht oder der Ausgang tot ist.
-
Nöö, Chrizz seins ist leichter. Diese Angeber aber auch.
-
Hi Alex, ich hatte für mein erstes Board eine ähnliche Motorsteuerung, da war aber der Empfänger nicht mit darauf. Der Empfänger ist meist eine eigene Platine. Diese wird, je nach Ausführung mit 10-12V versorgt. Ich hatte von Sonni eine FB mit Empfangsplatine, wo ein Spannungsregler mit integriert war. Der Signalausgang war im diesen Fall ein Open Collector (OC) Ausgang, welcher mittels pull up Widerstand gehen high gezogen wird. Dadurch war das Ausgangssignal invers (soweit ich mich erinnern kann). Um auf deine Frage: "wie sieht das Ausgangssignal aus", zurück zu kommen: Keine PWM, wie sie für Servos benötigt wird. Es ist ein digitales Protokoll, welches decodiert werden muss. Der Aufbau des Empfängersignals ist ausreichend beschrieben. Ich hoffe, deine Frage erfasst zu haben. VG Barney
-
Arduino / Teensy 3.1: Ja, sollte klappen. Folgende Fragen wären zu klären: 1. Pairing 2. Protokoll der Fernbedienung -> Frisch und munter ans Werk:D Wenn du den Empfänger dazu hast, ist es recht einfach. Das Protokoll des Empfängers wurde hier im Forum zweimal behandelt:http://www.elektro-skateboard.de/forum/eigenbauten-95/es-skates-fernbedienung-protokollanalyse-2169.php Ohne Empfänger würde ich es an deiner Stelle nicht versuchen. VG Barney
-
Und ist damit eine Frage verbunden? VG Barney
-
IRFP2907 http://www.segor.de/#Q%3DIRFP2907%26M%3D1 Beatbuzzer / Sonni haben da was noch besseres gefunden. Suche mal nach Beatbuzzer und MOSFET Strom ist nicht alles! Ron ist bald noch wichtiger. Die Schaltzeiten für die Anwendung als Ein-/ Ausschalter nicht. Ich meinte auch IR2181 oder IR2110, oder IR21xx Nein, da Teensy 3.1 3.3V benötigt:R-78 3.3-0.5 Der Teensy macht aus 5V 3.3V aber mit max 100mA. Du willst noch ein BT-Modul und den Nunchuk Empfänger, sowie einige LEDs versorgen. Da wird es mit 100mA knapp! http://www.segor.de/#Q%3DR-783.3-0.5%26M%3D1 -> Ja, der ist O.K.
-
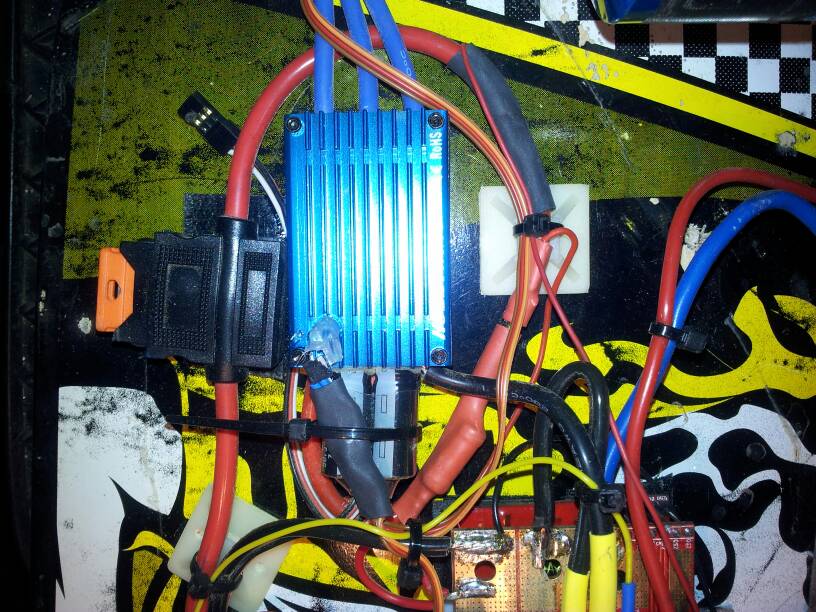
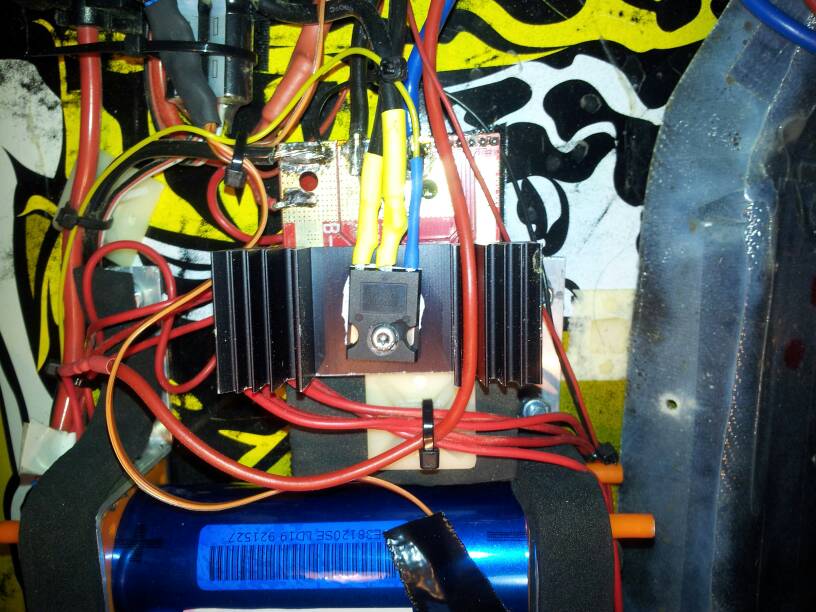
Hier die Bilder, der Aufbau ist keine Zier! Motorregler HV70 ohne Bremse: Power MOSFET zum Einschalten des Leistungsteil: Arduino Board mit Prototypen:
-
Hupe kann manchmal recht nützlich sein. Es kommt nur auf die Hupe an: Diesen Ansatz hatte ich auch! Es geht aber eher in diese Richtung:http://www.elektro-skateboard.de/forum/eigenbauten-95/controllereigenbau-bluetooth-arduino-2143.php Muss ich noch machen. Aber ich habe es am TO-247 direkt angelötet! Achtung der Teensy 3.1 gibt digital nur 3.3V aus. Diese reichen nicht mehr aus, den Power MOSFET direkt durch zusteuern.Hier muss ein Pegelwandler vorgeschaltet werden: IS2181 oder ähnlich. Es geht auch ein Transistor und zwei Widerstände. Schaltung folgt. Nicht ganz, da ich derzeit noch einen Ardunio Uno habe, habe ich mir ein Shield mit Lochraster Charakter als Grundlage genommen:http://www.segor.de/#Q%3DArduinoShield-ProtoR.3%26M%3D1 Es wird auf Lochraster ausgehen. VG Barney
-
Hi Fabian, das mit ab Juni, passt ganz gut. Dude hat das Teensy Empfangsprogramm für die Nunchuk Steuerung gut umgearbeitet. Vielleicht schaffe ich es noch die kommende Woche, alle anderen Funktionen (Strom-, Spannungsmessung, Temperatur und BT-Modul) zu testen. Sollte das alles wieder einwandfrei funktionieren, kann diese Software als geeignete Grundlage für die Teensy Fernbedienung dienen. Mit dem Verpolen des Teensys hattest du echt Pech. Zum Glück hält sich der Schaden in Grenzen. Bis demnächst. Viele Grüße Barney
-
Hi Dude, danke für die Überarbeitung des Programms. Besonders das Debug Flag, sowie die die Komponenten Flags gefallen mir. Ich wollte in der kommenden Woche so was für das Debuggen machen und du hast das schon für mich erledigt. Danke. Auch das Restrukturieren, des stückweise gewachsenen Programms, erleichtert das Lesen ungemein. Jetzt muss ich nur noch alte Register Kommentare anpassen oder löschen. Vor wenigen Tagen habe ich meine neuen Teensys 3.1 bekommen und kann die anderen Funktionen testen und den Arduino durch einen Teensy 3.1 im Skateboard ersetzen. Wirst du nur bei den Basisfunktionen bleiben? Kommt die Strom-/ Spannungsmessung, sowie das BT-Modul noch dazu? Achtung im Kommentar ist noch ein Fehler! Die analogen Eingänge des Teensys vertragen keine 5V, sondern nur 3.3V! VG Barney