eXo
-
Gesamte Inhalte
1.125 -
Benutzer seit
-
Letzter Besuch
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von eXo
-
Ok... jetzt bin ich überfordert. :confused5: Gui selber kompilieren? Status über die Konsole abfragen? Gibts da Anleitungen für? Du hast das doch bereits hinterdir.. kannst du deine Version bitte teilen? Anheben der Sperre hat nix gebracht.
-
Eine Idee hab ich noch: Vielleicht muss ich die Batteriesperre noch mehr anheben. Kann mir aber nicht vorstellen, dass iwie die beiden Ströme addiert erfasst werden und er deshalb unterbricht... :skep:
-
Ne, hab kein Kabel.
-
Langsam weiss ich echt nicht mehr weiter... einer der beiden VESC macht gar nicht mehr was ich ihm sage und der andere gehorcht. Kann sich das jemand erklären?
-
Da fällt mir auf... es gibt ja eine 2.8 Eneriton-Firmware. K.A was da genau anders ist, aber einen Versuch ist es wert. :skep: Noch eine Frage: wo genau sehe ich die angeblichen Fehlercodes und die dazu passende "Übersetzung" ?
-
Das Update war tatsächlich die Lösung für mein Problem. Mit der Version 2.8 verhält sich das Drehmoment jetzt endlich proportional. Nice! Aber es wäre ja langweilig wenn jetzt alles funktionieren würde, deshalb hab ich jetzt ein neues Problem. Ich habe noch nicht ganz herausgefunden warum, aber jetzt habe ich super krasse Beschleunigungs-Drops. Das System bricht für kurze Zeit in sich zusammen und den Hügel aus dem gestrigen Youtube-Video kann ich nun nicht mehr hochfahren. Der Vesc regelt die Drehzahl runter und bleibt im Hang einfach stehen. Die Motor und Batteriesperre hab ich bereits auf 80A angehoben. Jemand ne Idee?

-
Antriebstechnisch ist das Board mit den Gimbal-Motoren vermutlich leichter als meine Variante. Sobald das alles einwandfrei läuft, kümmere ich mich ums abspecken. Bei den China Motoren kann ich bestimmt noch Material wegspannen um das Ganze noch n bisschen leichter zu machen. Ein 4WD-Board werde ich vielleicht zum Spass mal in Angriff nehmen, aber den Nutzen erkenne ich aktuell noch nicht wirklich. Viel lieber würde ich mir 9 Inch Motoren mit 1. kW Leistung und sehr viel mehr Profil zulegen. Jetzt aber werden zuerst einmal die 500W Babys in Grund und Boden gefahren.
-
Die ES Jungs ziehen langsam nach und erkennen das Potential.. Brauchen sie nur noch den passenden Lieferanten für die schnellen Motoren. https://endless-sphere.com/forums/viewtopic.php?f=35&t=73258
-
Das Update auf die Version 2.8 zeigte in kurzen Tests erste Verbesserungen. Jetzt spuckt die Auto-Detection in beiden Systemen ähnliche Werte raus und die Motoren beschleunigen nun synchron im Leerlauf. Gestern war es dann aber zu spät um nochmal rauszugehen und die Dinger zu fahren. Mal sehen ob sich im Fahrverhalten auch etwas änderte. Werde das später testen und berichten. Die Idee mit dem Prüfstand ist gar nicht so übel, weil man sich damit ganz einfach eine Last simulieren kann und keinen Sturz riskiert. Bloss stelle ich mir eine passende Montage für die Radnabenmotoren noch ein bisschen umständlich vor. Muss mir das mal durch den Kopf gehen lassen. Einen Servotester habe ich keinen und mit dem Nunchuck habe ich bereits mehrere Stunden verballert und kein wirkliches Resultat auf die Beine gestellt. Mein grösstes Erfolgserlebnis war ein aufleuchtendes LED, welches auf die Z-Taste reagierte. Mit PPM drehen immerhin die Motoren. Sobald das Beschleunigungsproblem gefixt ist, werde ich dann versuchen die folgenden Baustellen zu fixen: - Hallsensoren - Nunchuck - FOC
-
Warum hab ichs kommen sehen? Ein Vesc wurde schön brav geupdatet. der zweite hat jetzt keine Firmware mehr und kann nicht mehr verbunden werden. Das schreit nach Linux und electro k.a was link2V zum flashen und noch mehr kaputt machen...stimmts? :D:D:D:D edit: ahhh phuun falscher alarm... es war nur ein software bug. Vesc 2 ist auch auf dem neusten Stand.
-
Weil das mit der 1.14 doch eigentlich genau so funktionieren müsste. Das wird mit jedem Update nur alles noch komplizierter.. Ich dachte das braucht Zeit mich an FOC heranzutasten. Zeit spielt aber nun auch keine Rolle mehr, also versuche ich das mal mit dem update.. :skep:
-
Die vorinstallierte 1.14 und bei zwei unabhänigen Vesc das selbe Problem. :confused5:
-
Danke für die Tipps. Werde das sofort der Reihe nach durchtesten. In der Zwischenzeit bin ich kurz n bisschen rumgefahren. Zuerst ganz flach und dann wurde es steiler und steiler. Bei 0:46 erkennt man so einen Boost in der Animation. Es war mein erster Boost heute und ich hab die FB gleich los gelassen. Man gewöhnt sich aber relativ schnell daran. Am sichersten ist es, wenn ich gleich beim Anfahren den Hebel ganz durchdrücke. So beschleunigt er ganz sauber hoch ohne mich vom Board zu hauen. Ab 2:26 bis 3:20 beschleunige ich einen Hügel hoch. Das eine Peak bei 2:42 war das Kommando für Vollgas, dann habe ich das bis nach Oben durchgezogen. Zwischen 20-32A Dauerlast bei Motoren welche eigentlich für 16 Ampere ausgelegt sind, kann auf Dauer nicht gut gehen. Bin mal gespannt wie lange es dauert und die Dinger glühen. Nach den ersten 300 Höhenmeter sind die Dinger doch bestimmt Müll. Vorsicht! Sorry für den "Ton". Habe nicht erwartet das die Software das Mic aufzeichnet und es eben selbst am PC zum ersten Mal gehört.
-
Nicht nur können sollte, sondern haben muss! Und wer genau hat nun sowas?
-
Hi Peter, Danke für die ausführliche Erklärung. Wenn ich also nun den Akkustrom begrenze, sollte das Problem mit der extremen Beschleunigung bzw. dem viel zu brutalen Drehmoment bei höheren Drehzahlen, ja dann theoretisch gelöst sein. Das muss ich gleich mal ausprobieren! Mein Gefühl sagt mir aber das noch was anderes nicht i.O ist. Mit meiner FB kann ich im Bereich von 1.60ms bis 2.00ms Pulsewith, weder im Leerlauf noch unter Last eine Reaktion erkennen. Die Motoren beschleunigen einfach Vollgas. Sobald die 1.60ms erreicht sind, dreht der Motor bedingungslos zum Maximum hoch. Mit den Begrenzungen kann ich wohl das Drehmoment drosseln, okey, aber wie komme ich an die 0.40ms des Hebelweg ran? Dazu noch ne Skizze. Aktuell reagiert das System wie in Blau dargestellt. Die rote Linie zeigt das Wunschverhalten... Jemand ne Idee wie ich mir das zurecht biegen kann?
-
Sorry, was genau heisst? "über einen zu großen Bereich ohne Back EMF betreibst"? Wo kann ich das umstellen? Die 20A in der v1.13 habe ich schon wieder auf 50 angehoben, weil teils einfach nicht genug Leistung vorhanden war. Ich kanns ja mal über die Batterie versuchen, ist ein Versuch wert. Wäre aber schon schön zu verstehen, was da genau passiert. Edit: Eigentlich sind es wohl nur zu heftige Werte für mich.. das System hat mit dieser rabiaten Beschleunigung keine ersichtlichen Probleme. Habe 2kW Spitzen in einer Aufzeichnung gesehen. Das Board sollte halt einfach erst Vollgas fahren, wenn ich denn Hebel ganz betätigt habe. Schön proportional. Wenn mal den Hebel übrigens durchzieht und Vollgas fährt, verhält sich das Szenario genau so wie im Video. Bis zur Hälfte des Hebelwegs beschleunigt der weiter vollstoff und fällt erst kurz vor der Neutralstellung in den "Leerlauf".
-
Hmmm, laut Hersteller waren das 12. Hier ein Bild: http://www.elektro-skateboard.de/forum/attachments/elektro-skateboard-werkstatt-48/radnabenmotoren-fuer-off-roader-2226d1437991949-hub-motor.jpg
-
Das habe ich mir eigentlich auch so gedacht und teils stimmt das ja auch. Wie gesagt das Teil schiesst ab so zirka 20km/h wie ne Rakete durch die Decke und haut mich jedes mal fast vom Board. Kann ich das iwie umstellen?
-
Das ist cool von dir Barney. Gleich lade ich noch iwie ein Video hoch, damit man gut sehen kann wie die Motoren auch im Leerlauf bereits ab 60% Gas ans Maximum hochdrehen. Das selbe passiert unter Last und ist entsprechend gefährlich. :skep: Edit: Demo-Video hub500_v1.13.xml.zip
-
Das positive vorne weg: Gestern habe ich quasi per Zufall die Lösung fürs ungewollte Bremsenverhalten im Stillstand gefunden. Es lag am mittleren Poti der GT2B. Dieser wurde wohl iwie verstellt. Und dann noch ein paar Problemchen: Das mit Abstand gefährlichste Problem (damit habe ich mein Daumen gekillt) habe ich gestern in der progressiven Beschleunigung gefunden. Sobald 50% des Hebelweges getätigt sind und eine bestimmte Geschwindigkeit erreicht wird, beschleunigt die Maschine plötzlich und ohne Ankündigung, extrem progressiv auf die maximal mögliche Drehzahl (es wurden 2kW Peaks gemessen). In der ersten Hälfte des Hebelweges kann ich ganz gezielt und sehr dosiert beschleunigen, ab 51% schaltet das System ohne Ankündigung auf Vollgas und wirft mich jedes mal „fast“ vom Board. Meine FB ist „verpolt“. (Sprich: Ziehen=Bremsen / Drücken=Beschleunigen) Frage: Könnte das der Grund sein für das progressive Verhalten? Da der Funk-Empfänger blinkt solange die FB inaktiv ist, gehe ich von aus, dass diese noch nicht korrekt gepaart wurde. Könnte die FB deshalb "verpolt" sein? Die Auto-Detection misst zwischen den beiden Motoren eine Differenz von +200 beim „BEFM Coupling“. Wie kann dieser Unterschied entstehen? Ohne CAN-Bus, reagiert einer der beiden Motor sehr viel feiner aufs Signal der FB als der andere. Woran könnte das liegen? Daher beschleunigen die Motoren im Leerlauf auch nicht synchron. Zudem zieht der früher einsetzende Motor (unter Last), entsprechend mehr Leistung als der andere.
-
Beim Versuch die Bremsleistung im Stillstand (mit gedrücktem Trigger) zu optimieren, habe ich wohl iwie was falsches eingestellt. Nun bremsen die beiden Motoren in der Neutralstellung. Es weiss doch bestimmt jemand, was ich da falsch eingestellt habe oder wo ich das am sinnvollsten suchen sollte?!?
-
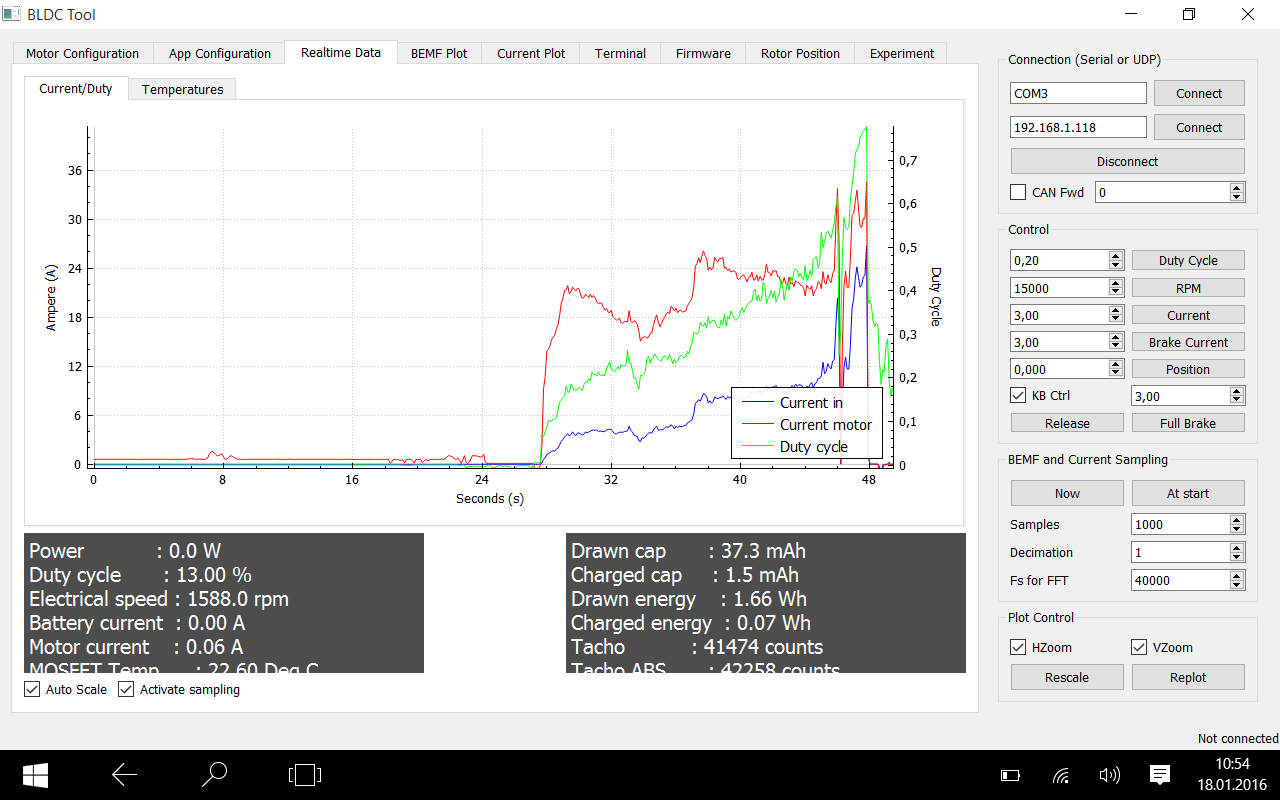
Danke fürn Versuch mich aufzumuntern, Barney. Obwohl die Testfahrt sehr kurz ausgefallen ist, vermitteln die zusehenden Messwerte doch schon ein paar Infos. Wie erwartet werden die zwei 500W Motoren beim Anfahren kurzzeitig überlastet. Heute werde ich das noch ein bisschen langsamer angehen, damit ich mich morgen, mit hoffentlich mehr als 25 Sekunden tracking, nochmal melden kann.
-
Nööö, dass ist das Cube iWork8. Das Tablet war damals gerade in Aktion und erfüllte meine Anforderungen. Der ganze Spass hat mich nun mit Transport und Zollgebüren exakt SFr. 89.90.- gekostet. (Ein Witz eigentlich) Der grosse Vorteil liegt meiner Meinung nach in der Flexibilität um Einstellungen vornehmen zu können. Für die gängigen Motortypen kann man sich ja meistens das entsprechende xml laden, anpassen und gut ist. Für den Hubmotor aus meinem Projekt gibts aber noch kein passendes Profil. Um die Einstellungen evaluieren und rasch ein paar Kleinigkeiten umstellen zu können, ist das Tablet wirklich super. Sobald das richtige Profil aber mal konfiguriert wurde, sind Anpassungen dann ja eigentlich nicht mehr wirklich nötig. Ich habe mir das Teil nur angeschafft, weil mein Computer im 4.OG viel zu weit weg ist von der Strasse. PS: Falls jemand ne Idee hat wie ich an die realtime data im BLDC-Tool rankomme um diese mit einem xml-file verarbeiten zu können, bitte immer her damit.
-
Jetzt noch einen Lacher, damit auch ja alle gut gelaunt einschlafen. Weil das Tablet sofort funktionierte wollte ich voller Euphorie mal kurz ein paar Messwerte aufzeichnen. FB in der einen Hand, in der anderen das Tablet. Ich hätte auch noch ein Video davon, aber in diesem Fall reicht ironischerweise ein simpler Screenshot. Etwa 25 Sekunden konnte ich mich auf dem Board halten, bis der Test mit einem blutenden Daumen und ein paar kleinen Schrammen endete. Dank Judorolle blieb zum Glück das Tablet und meine neue Mammutjacke unversehrt. Das Borad ist kurzzeitig jedenfalls ganz gut abgezogen.... hahaha.. aber halb so wild... die Tapete wächst ja bekanntlich schnell wieder nach. :peace:
-
Wow... ich habs einfach angeschlossen und es funktionierte!! Kein gebastelt, nichts mit sich Nerven, scheiße ist das geil! 😁 #diegeilsteprogammierkarteever