elkick
-
Gesamte Inhalte
684 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
1
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von elkick
-
Der Bootloader ist separat, aber man würde das bestimmt hin bekommen. Der Aufwand ist für mich nur größer als bei Win, da ich ohnehin schon Ubuntu hier habe.
-

Streetboard Eigenbau Konfigurationscheck, Verbesserungen erwünscht
elkick antwortete auf Rollexus's Thema in: Eigenbauten
Die gängigen 63er sind alle bis min. 8s ausgelegt, die oben beschriebenen 6354 bis 10s. Bezüglich VESC einfach ausgedrückt: 6354/260kv für 8s, 6354/200kv für 10s. -
wenn der VESC mit dem BLDC Tool nicht angesprochen werden kann, hat das meist eine der 4 Ursachen: 1. VESC hat keinen Strom, 2. USB-Kabel funktioniert nicht (tauschen), 3. der Port am Rechner wird nicht richtig erkannt (neu installieren) oder 4. die FW ist nicht korrekt installiert. Bei 4. kann es sein, dass mit einer älteren BLDC Version die ältere FW aufgespielt werden kann, ansonsten muss mit einem STLinkv2 die FW (und sicherheitshalber auch der Bootloader) neu eingespielt werden. PS. Kürzere Motorkabel wären besser, der VESC sollte aber trotzdem funktionieren.
-
Mal ganz der Reihe nach. Du hast jetzt auf beiden VESCs FW 2.4 drauf und machst welche Detection? Die unter BLDC Tab oder die unter dem FOC Tab? Aber egal welche du machst, passieren sollte schon was. Ich vermute ja schon, dass die bootloader von beiden VESCs nicht richtig installiert waren und dass dein Umweg zur FW-Installation zwar geklappt hat, die Funktion trotzen nicht gegeben ist. Die Anleitung für den Bootloader Update findest du auf vedder.se (im generellen Beitrag über VESC) und die Konfiguration des STLinks ist in einem separaten Beitrag.
-
Ja, das wäre die richtige. Falls das einer von Enertion ist, kann es aber sein, dass der Bootloader nicht richtig drauf installiert wurde. Die Fehlermeldung ist dann die gleiche. Helfen würde die Neuinstallation des Bootloaders. Geht aber nur mit ST-LinkV2 unter Ubuntu. Könnte ich aber für dich machen wenn das der Fehler wäre.
-
Du scheinst eine FW genommen zu haben, die nicht zu deiner HW passt. Einfach nochmal mit der richtigen updaten.
-
Streetboard Eigenbau Konfigurationscheck, Verbesserungen erwünscht
elkick antwortete auf Rollexus's Thema in: Eigenbauten
Damit schaffst du das zusammen mit den Komponenten die du oben genannt hast ohne Probleme. (Solange du nicht 30km am Stück den Berg hochfahren willst! ) -
Hier noch 2 Videos, die den Unterschied des VESCs mit/ohne FOC deutlich machen. Beim Betrieb mit 2 Motoren ist das noch extremer! http://www.esk8.de/videos/
-
Ja, 6 Pin geht problemlos, 7er habe ich nirgends gefunden. Wir haben die im Shop, allerdings ist es etwas aufwendiger für uns, für 1 Kabel extra zur Post zu fahren, daher verkaufen wir diese normalerweise mit den VESCs oder anderen Teilen. Das ist der Nachteil, wenn man das so neben dem normalen Job macht.
-
Alles einen Pin versetzen, d.h. entsprechend dem Foto bei Pin 2 beginnen, 1, 4 und 7 leer lassen. In der 7 Pin Auslegung (Beschriftung hinten an der Buchse auf dem VESC), Farbe des Nunchuk Receiver Kabels: 1 = leer 2 = RX = grün 3 = TX = blau 4 = leer 5 = GND = schwarz 6 = 3.3 = rot 7 = leer
-
Ist das Verhalten bei 1.14 gleich wie bei 1.10? Die KV Zahl durch 7 (Paare) kommt deiner KV Zahl schon näher. Die anderen Probleme kann ich ehrlich gesagt nicht beurteilen, hatte ich noch nie. Die PPM Abbrüche (bzw. deren Auswirkungen) sind aber nicht schön, normalerweise fängt das der VESC locker ab. Ist an der HW alles ok? bzw. ist das einer von Benjamin direkt oder von Enertion?
-
Ich suchte nach einem eigenen Board und brauche etwas Hilfe ;)
elkick antwortete auf DevilSTC's Thema in: Eigenbauten
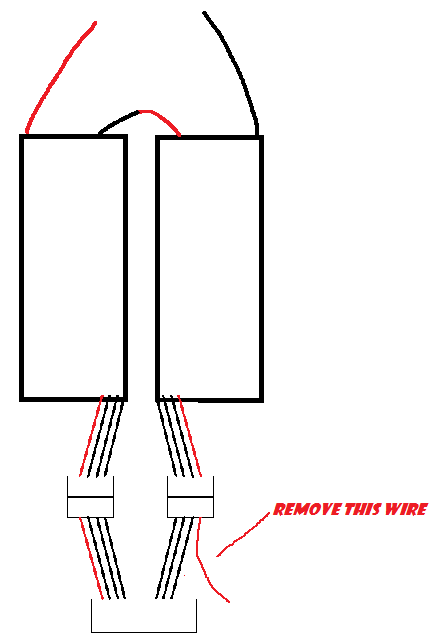
Weil du 2x plus dran hast. Versuchs doch mal so wie auf meinem letzten Bild. D.h. das rote Kabel rechts einfach weglassen, dann sollte es passen. -
Update: Alle FW Versionen sind jetzt vollständig. Allerdings ist die Firmware 2.3 für FOC natürlich noch nicht so stabil wie die 1.14, das sollte man wissen, bevor man mit einer ausgefallenen Motorenversion (oder 12s!) auf FOC wechselt. Benjamin verbessert die FW aufgrund der bisherigen Erfahrungen sukzessive. Mittlerweile sind meine Eigenbauboards mit FOC leiser als das Evolve! Hätte auch nicht gedacht, dass das geht. :thumbsup:
-
Streetboard Eigenbau Konfigurationscheck, Verbesserungen erwünscht
elkick antwortete auf Rollexus's Thema in: Eigenbauten
260 ist grundsätzlich schon ok bis , wobei beim VESC und 10s um die 200-240 etwas besser wären (habe ich in einem anderen Thread schon mal etwas Quatsch geschrieben, da ich das nicht bedacht hatte). Das hängt mit dem VESC zusammen, der zu hohe ERPM nicht so gern mag. -
Ich suchte nach einem eigenen Board und brauche etwas Hilfe ;)
elkick antwortete auf DevilSTC's Thema in: Eigenbauten
Hier ist noch ein schönes Bild (von ES):
-
Erste Tests sind wirklich unglaublich: die Motoren laufen so gut wie geräuschlos, erst bei starkem Bremsen hört man etwas, und auch dann nur leise.:thumbsup: "Kurzanleitung" zur Motor Detection im FOC Modus, ein Wiki Update mit Bildern kommt noch: BLDC-Tool V2.3 runterladen und im gleichen Verzeichnis die Firmware runterladen (mc_config_&_FW.zip) und entpacken VESC an die Stromversorgung anschließen und via USB verbinden "connect" klicken (BLDC Tool meldet limitierte funktion, da erst auf FW 2.3 upgedated werden muss) Firmware Tab anklicken, "choose..." anklicken im Verzeichnis mit dem Inhalt von mc_config_&_FW.zip: >firmwares 2.3 >und dort die richtige Hardware auswählen: V4.7 = "hw_46_47", V4.10 = hw_410 -> VESC_default.bin selektieren dann auf "Upload" klicken ACHTUNG: falls dann nichts passiert und der VESC sich disconnected -> VESC kurz ausschalten und wieder einschalten, sonst nichts verändern, dann wieder auf "connect" klicken und danach wieder auf "upload", dann geht's (*) nach dem Upload in den Tab "Motor Configuration wechseln" und "Read Default Configuration" (unten) klicken Seitlichen Tab "BLDC" selektieren" und dort den Commutation Mode auf "delay" umstellen (sonst nix ändern) Seitlichen Tab "FOC" selektieren Dann folgende Buttons in dieser Reihenfolge: "Measure λ", "Measure R and L", "Calc CC (Req: R and L)" HINWEIS: das Geräusch das die Motoren bei "Measure R und L machen" ist echt irritierend -> nicht verunsichern lassen! "Write Configuration klicken" (nur zur Sicherheit) zum seitlichen Tab "Motor" wechseln und "FOC" auswählen nochmal "Write Configuration" klicken in den oberen Tabs auf "App Configuration" wechseln und "read configuration" drücken danach wie immer die Fernbedienung einrichten (s. Wiki), danach "write configuration drücken", dann "reboot" (der Button jetzt oben rechts, nicht mehr unten!) Fertig. Nachtrag: auf dem Google drive den ich oben verlinkt habe fehlt im .zip file noch die richtige FW2.3 für VESC 4.7 (unter FW_410 = V4.10 ist alles vollständig da, darf aber für VESC V4.7 nicht verwendet werden)! Die einzige die FW 2.3 die im Ordner FW_46_47 drin ist funktioniert nicht. Wird von Jacob Bloy nachgereicht, dauert aber etwas. Wenn direkt mit der Ubuntu Version von Benjamin gearbeitet wird, ist das aber kein Problem.
-
Benjamin Vedder hat die neue Firmware mit FOC veröffentlicht: https://e2e.ti.com/blogs_/b/motordrivecontrol/archive/2015/07/20/teaching-your-pi-controller-to-behave-part-ii Muss ich heute mal testen, die Motor Detection ist natürlich etwas anders aufgebaut.
-
Nein, die brauchst du nur zum direkten anschließen des Kama Nunchuk Receivers.
-
Streetboard Eigenbau Konfigurationscheck, Verbesserungen erwünscht
elkick antwortete auf Rollexus's Thema in: Eigenbauten
Wenn Liion Akkus mit BMS verbaut werden reicht andererseits auch ein einfaches LiIon CCCV Ladegerät. -
Vom Endpreis 1600€ ausgehend, bekommt man 2 komplette Plug&Play Syteme hin, mit jeweils 2 Radnabenmotoren, die von Dutzenden von Leuten gefahren werden und sich bewährt haben. Diesen Nachweis muss Mellow erst noch bringen. Das Design ist zweifellos toll, aber was bringt mir das, wenn die Motoren dann ev. nicht so performen wie ich das gern hätte? Und das für 1600€ ohne Rückversicherung? Im übrigen habe ich das erste Mal Erfahrungen mit der Insolvenz eines Kickstarter Unternehmens sammeln dürfen. Das Thema Kickstarter hat sich für mich damit für alle Zeiten erledigt. Geld weg, kein Produkt, keine Rechte. So ist das eben. Wer auf's Geld verzichten kann, soll das ruhig machen. Das soll keine Unterstellung gegenüber Mellow sein, ich hoffe ja, dass das ein Erfolg wird.
-
Also die Kabel neben dem Elko sind die Stromversorgung, die drei unten am VESC gehen zum Motor. Die Reihenfolge der Motorkabel ist egal, wenn er rückwärts dreht, einfach zwei Kabel umstecken.
-
Du musst den Stecker vom PPM Kabel am Wiiceiver einstecken (obere Pins, wobei das eigentlich egal ist, nur richtig rum sollte der Stecker sein). Hase/Igel geht zumindest mit der älteren Version des Wiiceivers nicht, die neue kenne ich allerdings nicht. Musst mal im ES Forum schauen, da gibt's aktuell einen Thread dazu.
-
Generelle Frage zum Akku selber bauen
elkick antwortete auf e-serpentis's Thema in: Elektro-Skateboard Werkstatt
@christian, ich würde bei 7s Option 1 nehmen! Die Kapazität reicht locker und die Reserve beim Entladestrom ist für 7s ganz gut, auch wenn man sie kaum benötigen wird, außer ev. bei steilen Bergen! -
Gelöscht, weil ich das ja schon mal weiter oben geschrieben habe!
-
Ein Wifi Modul kann man auch an den VESC montieren. Zum Setup möchte ich mich mal selbst zitieren: Basis Konfiguration, Reichweite ca. 30km, Geschwindigkeit 40km/h: 30-36" Longboard Deck ohne Flex Caliber II Achsen Orangatang Kegel Wheels (Orange oder Purple) 1x 6354 Motor mit <230kV (oder 2 davon, falls häufig Steigungen befahren werden) 1x Motorhalterung für 63er Motoren (oder 2x, siehe oben) 1x VESC (Motorsteuerung, oder 2x, s.o.) 14er Ritzel/36er Zahnrad (oder 2x, s.o.) 9mm/275mm Zahnriemen (oder 2x, s.o.) 10s Akku, >7.5Ah mit BMS (z.B. selber bauen mit 18650er Zellen) oder einen fertigen 10S Lipo Akku mit BMS kaufen Ladegerät CCCV für 10s LiPo/LiIon oder Modellbauladegerät & Netzteil für 10s, falls kein BMS verbaut wird Antispark Powerswitch (zum Einschalten des Boards, selber bauen oder kaufen) Gt2B Fernbedienung (und ev. umbauen, s. Wiki) oder Kama Nunchuk am VESC Kleinteile wie Ladebuchse, Kabel, Lot und Lötkolben, XT60 Stecker und 3x (oder 6x) 4mm Buchsen für die Motoren Bezugsquellen: hobbyking.com, enertionboards.com, diyelectricskateboard.com, aliendrivesystems.com, alienpowersystem.com, esk8.de Das ist aber nur meine persönliche Ansicht, jeder hat andere Präferenzen!