

elkick
-
Gesamte Inhalte
684 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
1
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von elkick
-

Vom Album Miniboard V2 mit VESC
-

BMS + Ladestandsanzeige für 6S
elkick antwortete auf superlefax's Thema in: Elektro-Skateboard Werkstatt
Zwischen Powerswitch bzw. vor dem Motor +/- anschließen und per Taster die Anzahl der Zellen einstellen. Verbrauch von 200-700mW (?) ist etwas seltsam... Die Dinger brauchen normalerweise <20mA. Und das Teil kommt aus China, dauert schon so 3 Wochen. -
BMS + Ladestandsanzeige für 6S
elkick antwortete auf superlefax's Thema in: Elektro-Skateboard Werkstatt
Zum BMS: http://www.groetech.de/index.php?main_page=product_info&cPath=26&products_id=434 (7s/50A), am besten nachfragen, ob's das auch für 6s gibt oder das 6s/30A nehmen. Zum Voltmeter: Im großen Internet-Auktionshaus, Art.-Nr. 321644697191 (Link geht hier nicht) oder einfach nach Voltmeter suchen. -
Nur mal so: Meine Boards könnten zwar mehr als 30km/h erreichen, ich betreibe den Motor aber ausschliesslich zum Bremsen. D.h., wenn der Motor an meinem Board zum Einsatz kommt, dann trage ich einen Beitrag zur Verkehrssicherheit bei (insbesondere bei abschüssigem Gelände!). Sollte der Motor dennoch einmal als Antrieb zum Einsatz kommen (wofür er natürlich nicht vorgesehen ist!), dann ist dies nur an Steigungen bis max. 6km/h und dies konsequent nur auf dem Gehweg. Ich gehe daher vom Einsatz meines Skateboards als Fortbewegungsmittel gemäß StVO §24 Abs. 1 aus und da ich dies nur auf dem Gehweg betreibe, verstosse ich dabei auch nicht gegen StVO § 2 Abs. 1. Gegen §1, 2Abs. 1 Nr.6 Pflichtversicherungsgesetz verstoße ich auch nicht, da Skateboards generell (ob mit oder ohne Bremsmechanismus) immer in der Lage sind, schneller als 6km/h zu werden und es sich eben nicht um Fahrzeuge handelt. Genauso wenig wie Bobycars mit Batterien, Rollschuhe, Tretroller und Dreiräder. Sollte ich aus Versehen auf dem Gehweg einmal einen Ordnungshüter überholen, der mit seinem Rad unterwegs ist, dann geschieht das natürlich nur, weil ich per Muskelkraft mein Board auf diese Geschwindigkeit gebracht habe und der Kollege in Blau unter Umständen auch nicht gerade schnell unterwegs war. Der Motor des Skateboards - da er ja nur zum Bremsen eingesetzt wird (also ein "Bremsmechanismus") verkörpert - kam dabei selbstverständlich nicht zum Einsatz. Natürlich habe ich auch niemals nie irgendjemanden in Gefahr gebracht, weil der Gehweg ja frei war und ich niemanden behindert habe. Die Beweislast für eine vermeintliche Nutzung meines Motors inkl. des Verstosses gegen irgendwelche rechtliche Vorgaben liegt beim Ordnungshüter. Was das Board alles könnte, ist in diesem Zusammenhang uninteressant, da es sich ja um ein Skateboard mit 4 Rädern als Spielzeug (Fortbewegungsmittel) handelt. Modifiziert mit einer Motorbremse zur Erhöhung der Sicherheit von Dritten. Sollte also jemand behaupten, ich benutze den Motor als Antrieb, soll derjenige das bitte rechtssicher belegen. Ob meine Argumentation jemals Erfolg hätte - keine Ahnung! Könnte man dann ja (ev. mit Änderungen in Details, z.B. "Ordnungshüter-6km/h-Panik-Button" am Nunchuk) - mal durch die Gerichte prüfen lassen.
-
You'll get it back, but the situation is rather unfriendly from a legal perspective: http://daubner-verkehrsrecht.info/2013/rechtliche-einordnung-eines-motorbetriebenen-skateboards-teil-1 Still a long way to go to change things here! It seems to be more fun to prosecute e-skaters than chasing the real bad guys...
-
Bin ab und zu in Berlin, so alle 2-3 Wochen - ich sag dann einfach Bescheid wenn ich mal wieder da bin. Seismic habe ich noch nicht ausprobiert, fahren die sich generell softer als Flywheels oder Kegels? Bremsen sind aber eine coole Sache, da kann man auch mit Flipflops auf's Board. Der VESC ist m.E. der erste ESC mit angenehmem Bremsverhalten, sowohl bei hohem als auch niedrigem Speed, alles einstellbar. Ist alles subjektiv. Hubmotoren sind beim Zoll, warte (mal wieder) auf die Post für den Abholschein, dann wird auch das Longboard mal fertig. Dank deiner Laminiertipps hat das jetzt auch eine ansehnlichere Box! :elektro-skater3:
-
Sorry Barney, habe deinen Event Eintrag erst gerade gesehen. Muss zurück nach HH heute Abend, sonst wäre ich dabei gewesen!
-
Aufladen mit 2A. Das dauert ewig. Und Bluno Beetle für Nunchuk Umbau bestellen.
-
Habe ich gestern mit einem Lipopack versucht, geht auch nicht! PS. Es hat's gerade so überlebt.
-
Wieviel das Beercan Brewster allein wiegt, weiß ich nicht. Gibt auch verschiedene Modelle. Das gesamte Board mit Caliber Achsen, 83er Flywheels und Elektronik & Akku liegt bei knapp 5kg. War heute den ganzen Tag damit unterwegs in Berlin, genial zu fahren. Wendig und trotzdem sehr stabil. Chrizz' Board muss ich mir aber auch mal ansehen, das dürfte sehr viel leichter sein!
-
Absolut korrekt! Habe die Erfahrung gerade gemacht, als ich wieder draußen war um das gesenkte Limit auszuprobieren: der VESC dachte andauernd, ich wäre nicht mehr da. Nachdem ich den Timeout wieder hoch gesetzt hatte war alles wieder gut. Mit den momentanen Nachteilen des Nunchuks kann ich leben, aber eine sicherere Lösung (wie das Beispiel mit dem Gaspedal beim Auto) wäre natürlich besser.
-
Nachdem jetzt alles festgeklebt ist und der VESC nun so läuft wie er soll, bin ich äußerst zufrieden mit dem Resultat. Gasgeben und Bremsen hat nun Evolve Niveau. Wie vermutet wurde das Board wegen des dicken Alu-Decks knapp 5kg schwer, die original Bushings musste ich mit härteren ersetzen, war alles zu sensibel für höhere Geschwindigkeiten. Reichweite ist noch ungetestet, müsste aber unverändert bei ca. 25km liegen oder höher, da ich die Übersetzung noch etwas optimiert habe. Highspeed ist noch ungetestet. Da mir die Nyko Kama Nunchuks so langsam ausgehen und die Dinger hier überhaupt nicht mehr zu bekommen sind, habe ich jetzt 10Stück (Mindestbestellmenge) in USA bestellt. Kann das ein oder andere davon abgeben, falls das jemand brauchen kann (für den VESC oder Wiiceiver) - setze sie wenn sie hier sind im Verkaufsbereich rein.
-
Ich habe jetzt das Timeout Limit weiter gesenkt (0,5 sek), das hilft aber nur bedingt. Solange der Beschleunigubgssensor valide Daten schickt und z.B. der Poti im Nunchuk klemmt, nützt das alles nix. Die Wahrscheinlichkeit dafür ist allerdings zum Glück eher gering. Wichtig ist jedenfalls die ausfallsichere Befestigung der Kabel. @Barney: Empfangsqualitätscheck wäre genial!
-
Ich habe den Fehler gefunden, es lag an einem Wackelkontakt am Datenkabel zwischen VESC und Nunchuk Receiver. Alle anderen Verbindungen waren ok und dadurch wurde auch das Nunchuk als verbunden vom VESC erkannt. Da aber immer noch Daten innerhalb des Timeout Limits gesendet wurden, ging der VESC von einer normalen Verbindung aus, sonst hätte er die Power vom Motor weggenommen und das Board wäre ausgerollt... Ein paar kleine Fehler habe ich noch in den Motorparametern im BLDC Tool gefunden und jetzt klappts auch. Zumindest hatte ich heute auf 15km Rundkurs keine Probleme mehr. Starten aus dem Stand geht jetzt optimal, aber an Steigungen habe ich das noch nicht versucht! @Gerald: kann ich nachvollziehen. Falls mir das nochmal passiert gehe ich auch wieder auf die normale Funksteuerung zurück.
-
Kurzes Update zum VESC: fährt sich super, fast wie mit Sensoren. Und einen Rat: neue Technik immer in freiem Gelände testen! Hatte gerade einen Komplettausfall des VESC: Motor lief weiter, keine Reaktion auf irgend eine Massnahme am Nunchuk, kein Bremsen, nix. Blieb nur Abspringen und das unkontrolliert weiterfahrende Board wieder einfangen. Die Nunchuk Verbindung war stabil, keine Ausfälle, stoppen liess sich das Board nur durch komplettes Ausschalten (als ich es dann eingeholt hatte ). Habe versucht, dieses Verhalten zu Reproduzieren - Fehlanzeige. Das einzige was nach ein paar weiteren Minuten passierte: VESC legte sich schlafen (keinerlei Reaktion, aber immerhin keine Power auf dem Motor mehr). Werde versuchen mittels BLDC Tool die Ursache zu finden, das darf sich auf keinen Fall wiederholen!
-
Ein Kabel gibt es nicht, Pinbelegung s. hier Nunchuk Receiver Dongle öffnen, silbernen Stecker abschneiden, Kabel verlängern und in der richtigen Reihenfolge in einen micro-JST Stecker einbauen und einstecken (und festkleben). Das sind diese Kondensatoren, gibt 8 Stück auf dem Board.
-
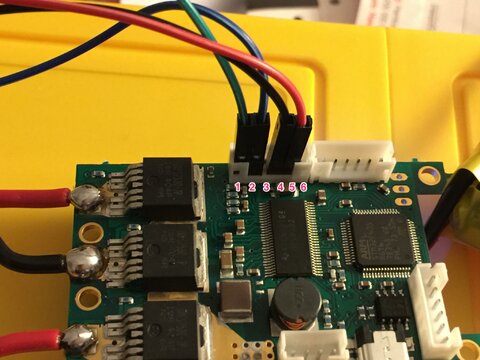
Original Kama Receiver geht. Im BLDC Tool kann man übrigens den Z-Knopf mit Reverse belegen und die anderen Werte für das Nunchuk noch etwas anpassen. Die Verbindungskabel werde ich in einem micro-JST Stecker in die Buchse kleben, auf der Seite des Receivers werden die Kabel ebenfalls festgeklebt. Pinbelegung: rot - 3.3V -> 5 schwarz - GND -> 4 blau - Data -> 2 grün - Clock -> 1 Pin 6 und 3 bleiben leer - s. Bild:
-
Vom Album Miniboard V2 mit VESC
-
Könnte mit Virtual Box gehen, hatte es mit Parallels versucht, aber der USB Port wurde nicht erkannt (habe alles mögliche versucht, Ububtu VM wollte den nicht erkennen). Kann aber schon an Parallels liegen. Hab's dann mit EFind gelöst, nicht so elegant, aber funktioniert. PS. Logic3 Dongle-Receiver geht mit VESC nicht, versuche es jetzt mit dem Original Kama...
-
Nein, das würde ich mit 10s nicht ausprobieren, liegt aber nicht am Design, sondern daran, dass Jason (Enertion) vom Zulieferer die fertigen VESCs mit zu klein dimensionierten Kondensatoren bekommen hat, obwohl in der Teileliste die richtigen standen! Das wusste er allerdings nicht und bei ihm funktionierten sie auch (Zufall, ebenes Gelände, Duales Setup, was auch immer...) Im übrigen würde ich den Schrumpfschlauch entfernen und nachsehen, ob alle Lötstellen ok sind. Kannst du ja danach wieder verpacken. Und wie gesagt besser die 8 Kondensatoren tauschen, bevor du mit 10s Gas gibst.
-
Da du einen Enertion VESC hast, würde ich mir vorher überlegen, ob du die 8 unterdimensionierten Kondensatoren noch tauschen willst. Außer du fährst mit <=6s, dann sollten sie ev. halten. Der VESC hat den Wiiceiver eingebaut, d.h. du musst die Kabel des Kama-Receivers mit dem VESC verbinden. Richtige Farbe beachten. Bin auch gerade dabei, melde mich wenn ich weiter bin! PS. Dann hat die Post bei dir aber auch recht lange gebraucht!
-
Hi, vieles was du an Fragen hast, wird in den Eigenbau Threads diskutiert, aber hier einige Ansätze -> alles nur meine persönliche Meinung! 1. Alienkit: teuer, die Halterung kann man selbst machen, wer aber keine Lust und Zeit hat kann dort zugreifen, Qualitätsprobleme werden normalerweise schnell gelöst. USB Programmierung der ESCs ist sehr komfortabel, allerdings nicht unbedingt ein Kaufgrund, das geht anders günstiger und genauso schnell. Andere ESCs sind auch nicht schlechter, aber ev. günstiger. 2. Deck/Achsen: Konkav geht, aber dann sollte m.E. die Box drauf laminiert werden, alles andere ist schwierig. Ohne Flex = alles viel stabiler und bei den kleinen Boards bist du trotzdem wendig genug. Breite der Achsen beim Miniboard ca. 150-160mm -> kommt auf die Grösse des Decks an, 180er sieht etwas seltsam aus, >80mm Flywheels oder >80mm Orangatang Kegels. 3. s. Miniboard V2 (Beercan Deck) da ist die Befestigung der Box ein Kinderspiel. Das Deck aber Geschmacksache! 4. Min. 5060/245KV oder 6354 wenn's bergauf gehen soll, inkl. entsprechender Übersetzung und besser >6S Akku.
-
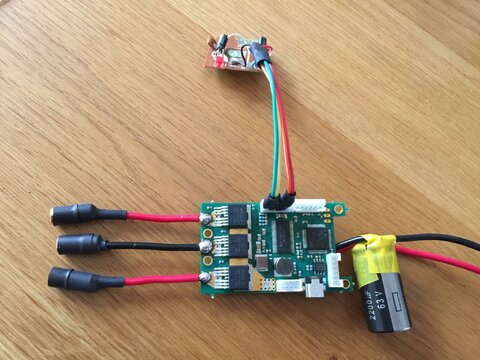
Ein kurzes Update zum Miniboard. Bin jetzt auf ein breiteres Beercan Brewster Board (77cm) umgestiegen und habe wieder Caliber Achsen mit einer Alienhalterung, einen 5060/270KV und Flywheels 83mm verwendet. Lag alles noch hier rum. Das Beercan Board hat den Vorteil, dass die auf der Unterseite des Decks verarbeitete Struktur für alle Arten von Boxen geeignet ist, einfach T-Stücke einschrauben - fertig. Den VESC dafür habe ich von Benjamin Vedder bekommen - der größte Aufwand bestand in der Installation von Ubuntu auf Mac (nativ, VM geht nicht!), das Installieren des BLDC Tools und der Upload der Firmware ist auf seiner Seite beschrieben und recht einfach. Am VESC mussten noch die Kabel und der Elektrolyt Kondensator dran. Funktioniert alles, nun muss nur noch der Nunchuk Receiver angepasst werden (Kabelbelegung des Receivers ist etwas mühselig, die Farben der Kabel sind bei den verschiedenen Receivern uneinheitlich). Falls das jemanden interessiert, kann ich die Resultate hier reinstellen. Detaillierte Daten: - Beercan Brewster Deck - Caliber 50er Achsen 158mm, ohne Riser pads - 83mm/80a Flywheels - Alien Halterung - 7s6400aH Akku - BMS 80A - Alien Antispark Powerswitch - 5060/270kv Motor (Hobbywing) - VESC (nicht via Enertion!) - 2x HD-Archiv-Hüllen als Box Die Beschleunigung aus dem Stand ist endlich vergleichbar mit dem Evolve und das ohne Sensoren. Erste Tests draussen mache ich morgen, hier noch ein paar Bilder:
-
Vom Album Miniboard V2 mit VESC
-

Vom Album Miniboard V2 mit VESC
