elkick
-
Gesamte Inhalte
684 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
1
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von elkick
-
Jeweils zwei waren vom 18. Juni und zwei vom 10. Aug. Ich denke, dass deine bei dieser Lieferung jetzt dabei sein sollten. Kann auch an GLS liegen: als Auslieferungsdatum stand 03. Sept. drauf, angekommen ist es erst heute! Also müsste das bei dir auch bald da sein....:thumbsup:
-
Ist ja wie Weihnachten heute! Die Ampcite VESCs sind jetzt doch noch eingetroffen.

-
Ein paar clippings zum setup der boards für kids. Der VESC ist dafür prädestiniert...:cornut: (music by myself) [video=eSk8boarding: Kids Setup]491
-

ESC ohne Transmitter steuern?
elkick antwortete auf staegros's Thema in: Elektro-Skateboard Werkstatt
Der kV Wert geht schon, etwas niedriger wäre normalerweise ratsamer. Irgendeinen 5060er mit 245kv oder 270kv. Andererseits wird das immer knapp mit den 10A deines BMS und den 20A die deine Akkuzellen liefern können. Selbst beim Anfahren in flachem Gelände dürfte der Motor min. 30-40A ziehen beim Gasgeben. Es kommt dann sehr auf die Übersetzung an. Schau am besten mal den Ritzelrechner von Barney an.- 14 Antworten
-
- 1
-

-
- eigenbau
- elektro board
- (und 3 weitere)
-
ESC ohne Transmitter steuern?
elkick antwortete auf staegros's Thema in: Elektro-Skateboard Werkstatt
@staegros: mit den Akkuzellen und dem ausgewählten BMS dürfte aber nur flaches Gelände drin sein. Und zusätzlich ein paar Kicks beim Anfahren wegen des kV-Werts des Motors. Hast du mal nachgeschaut, ob der Flugregler eine Bremsfunktion hat? Ein günstiges Ladegerät findest du z.B. von Ansmann für 7s. -
Nächste Lieferung im November. Habe aber auch eine Versandbestätigung inkl. Tracking von ihm bekommen. Gehe auch davon aus, dass die Teile jetzt funktionieren, er hat den Zulieferer gewechselt.
-
Habe das gleiche Problem wie Chrizz, im Juni und im Juli jeweils 2 bestellt, beide Lieferungen noch nicht hier. Am 24.08. hatte Marcin bei ES geschrieben, dass er am 25.08. 31 Stück versendet (inkl. Foto der frankierten Kartons), seit dem nix. Auch keine Antwort auf diverse emails. Ich werde jetzt bis morgen früh warten, ob noch eine Antwort von ihm kommt. Ansonsten frage ich ihn in seinem Verkaufstherad mal ganz freundlich nach dem Status. Bin mittlerweile ziemlich genervt, sehe das aber wie Dude, er ist wirklich nicht der schnellste.
-
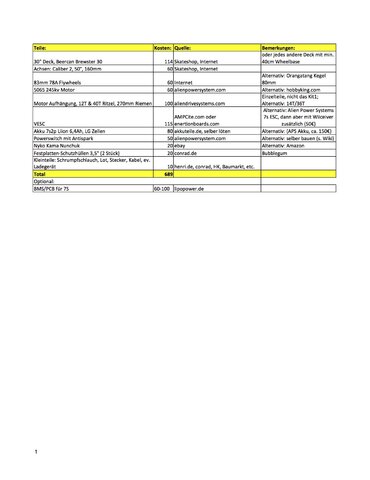
Ich werde die Kosten updaten. Wobei meine Motoren ohne Sensoren damals etwas günstiger waren. Wenn man die Halterung selbst baut, kann man einiges an Kosten sparen. Wenigstens sind die neuen ADS Teile etwas haltbarer geworden (bei Nico ist die alte Halterung gebrochen). Ich finde die Preise von ADS generell etwas ambitioniert, liegt wahrscheinlich an der geringen Stückzahl.
-
Stimmt natürlich, die sind auch schön klein. Hatte Nanos noch hier rumliegen und hatte daher damit angefangen. Mal sehen, ev. stelle ich noch um. ERPM für die Höchstgeschwindigkeit ausrechnen und soft RPM Limit setzen müsste auch gehen (hab's aber noch nicht getestet, warte noch auf die zusätzlichen VESCs von Marcin, der braucht gerade ewig mit dem Versenden!). Fahre momentan mit den Hub Motoren den Flier ESC mit 7s, weiß aber nicht was passieren würde, wenn ich Vollgas geben würde. Wahrscheinlich Abflug bei 68km/h laut Berechnung...
-
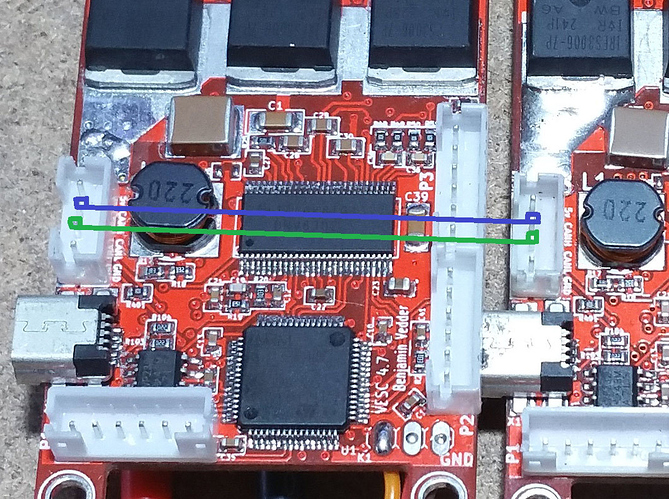
Eine zweipolige Verbindung auf dem CAN-Bus mittels 4Pin JST-PH 2mm Stecker (mittlere Pins). Da brauchst Du eigenlich nicht viel löten, ausser ev. die Kabel zu den Steckern zu verbinden. Im BLDC Tool wird dann der 2. VESC als slave definiert und mit gesteuert. (Foto von Jason - Enertion)
-
In unserem Fall hängt unsere Gesundheit direkt von der Nunchuk Verbindung ab. Einer Wii ist es normalerweise recht egal ob das Nunchuk noch da ist oder nicht, daher genügt ein Receiver (und kein Transceiver). Der ESC reagiert in unserem Fall auf einen voreingestellten Timeout bei Ausfall des Nunchuks mit Gaswegnehmen und und das Board rollt einfach aus (ich habe dann allerdings auch keine Bremse mehr, was auch schon mal unangenehm werden kann). Es handelt sich also um eine mono-direktionale Verbindung mit dem weiteren Nachteil, dass z.B. im Falle eines Wackelkontaktes auf dem Datenkabel zwischen Receiver und ESC der ESC ja immer noch Signale erhält und davon ausgeht (weil Timeout nicht gegeben!), dass das Nunchuk noch da ist. Ist es aber nicht. Und dann geht das Board auf Autopilot und damit ausser Kontrolle. Hatte ich schon mal. Nachdem alle Verbindungen am Board doppelt gesichert sind, hatte ich keinerlei Ausfälle mehr mit dem VESC, es ist als soweit ok. Kann man so machen. Schöner und vor allem sicherer ist es allerdings, wenn eine bi-direktionale Verbindung gegeben ist, sprich: der Receiver ist gleichzeitig als Transmitter in der Lage zu sehen, ob das Nunchuk noch da ist und meldet dies denn dem ESC, der darauf reagieren kann. Das kann ich mit dem nRF recht einfach umsetzen.
-
Genau (bei V4.8 ist das dann nicht mehr nötig)! Daher habe ich es bisher auch beim Nano +nFR belassen, habe keine Lust mit meinem Löteisen dort ran zu gehen. Der Nano nimmt ja auch kaum Platz weg und auf der Gegenseite (Nunchuk) brauche ich ja auch einen und dann lasse ich die beiden friedlich mittels sehr einfachem skript miteinander kommunizieren. Wenn ich dann endlich mal fertig werde, gibt gerade noch andere Prioritäten (Hub Motors V2)...
-
Das ist ein Tranceiver Modul, korrekte Bezeichung "nRF24L01+": Beschreibung
-
Nein, das müsste über PPM (RC-Servo) Anschluss eigentlich gehen. Zumindest funktioniert bei mir der GT2B Empfänger dort problemlos. Habe oben nochmal editiert, weil missverständlich bezüglich der pwr_comm buchse, hier das Layout für den NRF+-Direktanschluss von Benjamin: CE -> tied to VCC CSN -> the servo input (you have to remove the lowpass filter on the servo input) SCK -> ADC_EXT pin MOSI -> SDA pin MISO -> SCL pin IRQ -> not connected VCC -> VCC GND -> GND
-
Bisher teste ich das via Nano+NRF, also nicht direkt. Der Nano hängt dann am 6Pin-Port und steuert den NRF. Ich habe das so verstanden, dass man auf pwr_comm alle Pins des NRF direkt mit dem VESC verbinden kann, aber einen nicht und dass dann ab FW 1.11 die Steuerung direkt möglich sein sollte. Aber ausprobiert habe ich das alles noch nicht.
-
Nein, auf die HW, die FW wird häufiger upgedatet. Die HW Änderungen sind aber minimal, Direktanschluss eines NRF Transceiver ist neu möglich (pwr_comm mit einer 7Pin Buchse ersetzt), etc.
-
@Nizz: Benjamin testet gerade die V4.8 des VESC und wird Ende der Woche ein Update dazu hochladen. Es lohnt sich ev. ein paar Tage zu warten.
-
1mOhm 160A ist für eSakteboards richtig, 300A ist für RC-Cars...
-
Das ist alles unter "Resources" hier verlinkt: http://vedder.se/2015/01/vesc-open-source-esc/
-
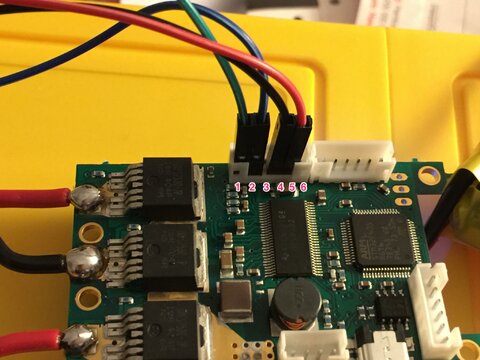
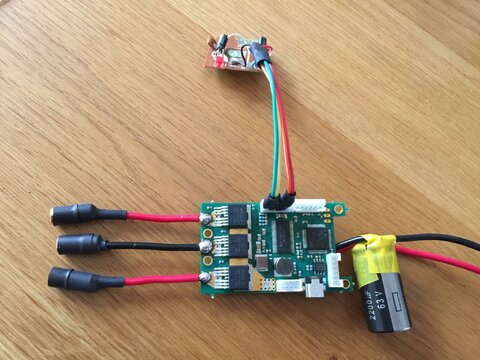
Update: ich habe dem Miniboard einen Motor mit Sensor spendiert und mit dem VESC verbunden. Der Motor ist ein Alien 5060/270kv, den mit dem Motor mitgelieferten Stecker musste ich durch einem JST-PH 2mm/6Pin ersetzen. Nicht so schön dabei: die Farben der Sensorkabel sind so non-standard wie möglich, d.h. 36 Kombinationsmöglichkeiten (s. Foto). Mit dem Multimeter bekam ich wenigstens +/- raus, dann wurde es einfacher. Falls jemand das gleiche plant: gelb = 5V rot = GND grün = Temp blau, weiß, schwarz = H1-H3 Das Layout der Hall-Sensor Buchse ist auf vedder.se zu finden. Im BLDC Tool nach der Motorerkennung unbedingt die erkannten Sensorwerte in die Tabelle eintragen, sonst geht nix! Fazit: im flachen Gelände kaum einen Unterschied, bei unebenem Boden oder Steigungen sehr angenehm. Muss das aber noch an einem anständigen Hügel testen. Der Hybrid Mode ist tatsächlich ein Vorteil - im oberen Bereich ist der Motor dadurch einfacher zu steuern, da die Effizienz der Sensoren mit der Geschwindigkeit abzunehmen scheint.
-

Vom Album Miniboard V2 mit VESC
-
Daten: - Beercan Brewster Deck - Caliber 50er Achsen 158mm, ohne Riser pads - 83mm/80a Flywheels - Alien Halterung - 7s6400aH Akku - BMS 80A - Alien Antisparc Powerswitch - 5060/270kv Motor (Hobbywing) - VESC (nicht via Enertion!) - 2x HD-Archiv-Hüllen als Box
-
-

Vom Album Miniboard V2 mit VESC
-
Erkennung der Zuordnung der Sensorkabel.
elkick hat ein Bild in der Galerie erstellt in: E-Boarder Alben

Vom Album Miniboard V2 mit VESC
-
Nehme an du hast das an der original Fernbedienung gemacht? Ist der Weg des Potis für die Lenkung länger? Bzw. kannst du die Gasempfindlichkeit nicht auch am ESC verändern?