axx
-
Gesamte Inhalte
73 -
Benutzer seit
-
Letzter Besuch
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von axx
-
Hehe Danke, das Teil soll ne Runde halten und da dachte ich mir ich mache es lieber gleich richtig als 2x Bin gespannt wie es sich in der Praxis macht :thumbsup:
-
Hallo Barney, danke für den Tipp, klar, wenn das ding losschiesst ists eher schlecht, vorallem da es kein "kleines" Gerät ist und natürlich kein Versicherungsschutz besteht, hätte auch sobald der Code auf dem Labortisch funktioniert erstmal alle erdenklichen Szenarien durchgespielt und es erst ans Board geklatscht sobald in wirklich jeder Situation ein Fail-Safe Garantiert ist, auch wenn das Board vllt eher Safe-Life gebaut ist :arf: Was wäre denn eine sichere Alternative? Ich habe hier grade noch eine 2,4 Ghz FlySky Funke rumfliegen, mit dieser geht das ganz wunderbar, allerdings ist der Einstellbereich des Zeigefingerpotis doch sehr klein, sprich da passiert auf kurzen Wege ganz schön viel..! Die Möglichkeiten in Todds Code sind wirklich durchdacht. Sobald du C drückst, geht der Motor auf die kleinstmögliche Drehzahl (stellst du im Code ein) und mit jedem Mal Joystick HOCH geht er eine Stufe hoch und hält diese geschwindigkeit bis der C knopf losgelassen wird. Z dient als Bremse und sendet einen Bremswert X. Verdammt Axt, ich will das es jetzt funktioniert LG Alex
-
Weiter gehts: Kabel zu Spannungsversorgung AWG6(14mm2) für 8S2P Akkus und Akkukasten, beides mit Klettband Motor: Turnigy G110 - 210KV Max current: 60A - 2000kW und das ganze 2x Nebenbei noch eine Bremsanlage, nutze ich um ohne Antrieb mal downhill zu fahren, durchaus denkbar einen Servo einzubinden der über das Throttle Signal die Bremse betätigt. 3D Entwurf für die Motorhalterung 320W Ladestation :cornut: ESC wurde mit Plastidop Wasser"dicht" gemacht. Schwingungsdämpfer und die Halterung für den ESC zu entkoppeln. Kabel vom Akkukasten zum Regler 200Amp Sicherungsautomat, klein in der Ecke ein Taster für Antispark.
-
Hey Barney, schonmal danke für die rasche Antwort. Was meinst du mit "es ist kein Bluetooth"? auf der Packung vom Nunchuk stand es drauf und das Modul sieht auch irgendwie nach "Funk" aus und da muss doch drin sein was draufsteht auch wenns aus china kommt? :D:D wie auch immer, irgend ein Funkprotokoll wird es sein Was mich so sehr wundert ist das der erste Code funktioniert, wenns nach mir geht würde ich ja "einfach" den zweiten Code von Todd in den ersten Code einbauen, bzw den ersten so umbauen das er die Charakteristik von Todds Code hat. Leider fehlts mir da noch ein bisschen. das "chuck.begin();" ist im ersten, funktionierenden Code verbastelt und nicht in Todd's. Ich habe mir diesen Code runtergeladen und nicht selbst geschrieben:confused5:, habe zwar ein paar einblicke in objective-c bekommen allerdings bin ich davon was da passiert noch etwas entfernt:confused5:. Die Parameter anzupassen ist nicht das Problem. Werde Todd mal eine Mail schreiben,vielleicht hat er ja eine Idee woran es liegt. Danke auf jeden fall schonmal für den Tipp, ich bleib am Ball!
-
Also zunächst habe ich mir folgenden Code runtergeladen: (link zum Forum) http://endless-sphere.com/forums/viewtopic.php?f=35&t=57316 #include <Wire.h> #include <WiiChuck.h> // Library for Wii Nunchuck #include <Wii.h> #include <ArduinoNunchuk.h> #include <Servo.h> // Library for controlin Servo or ESC WiiChuck chuck = WiiChuck(); Servo myservo; int speed_val; // Speed value int speed_val_cur = 95; // Current speed value int y = 0; // Jaystick value int time = 200; // Delay timer int speed_val_hold; // speed value which will be holded while Z button is pressed void setup() { Serial.begin(115200); chuck.begin(); chuck.update(); myservo.attach(11); // ESC attached to 9 pin of Arduino } void loop() { // If you hold down Z button of Nunchuck you accelerate faster if ((chuck.buttonZ)||(chuck.buttonC)) { if (chuck.buttonZ) { Serial.print(" Z "); time = 100; speed_val_hold = speed_val_cur; // Sets speed value to hold } // If you hold down C button of Nunchuck you accelerate slower if (chuck.buttonC) { Serial.print(" C "); //time = 100; } } else { time = map (speed_val_cur,60,80,100,250); speed_val_hold = 95; } delay(time); chuck.update(); y = chuck.readJoyY(); // Maps the joystick value to the speed value (max speed 130) max posible 179 Serial.println(); speed_val = map(y, -105, 73, 95, 149); // This is what hapens in case we loose a Blue tooth connection if (y > 122) { speed_val = 95; // 60 means – no speed , motor stoped speed_val_cur = 95; // 60 means – no speed , motor stoped speed_val_hold = 95; } // This is whats hapens then we again have BT signal, it just restarts everything if (y == 124) setup(); if (y <= 0) { speed_val_cur = 95; speed_val = 95; } if (speed_val_cur < speed_val) { speed_val_cur = speed_val_cur + 1; } else speed_val_cur = speed_val; if ((speed_val_hold > 95) && (y > 0) ) speed_val_hold++; // If hold button is pressed and joistic moved up – increase speed if ((speed_val_hold > 95) && (y < 0) ) speed_val_hold--; // If hold button is pressed and joistic moved down – decrease speed if (speed_val_hold > 95) speed_val_cur = speed_val_hold; if (chuck.buttonC) { speed_val_cur = 95; //time = 100; } myservo.write(speed_val_cur); // Here we control ESC //—– Printing to screen to see results ——— Serial.print("Joy = "); Serial.print(y); Serial.print(" "); Serial.print("Speed = "); Serial.print(speed_val_cur); } Mit diesen Code(Arduino) kannst Du dir die Signale die vom (Bluetooth) Nunchuk Modul kommen und am Nano angeschlossen sind, über den Serial Monitor anzeigen lassen (+ - DATA(SDA) und CLOCK(SCL) sind verkabelt) Soweit, sogut, also der Nunchuk ist schonmal mit dem Arduino Nano verbunden und überträgt die Signale so wie er soll. Zudem ist es mit diesem Code möglich über "myservo.attach(11); // ESC attached to 11 pin of Arduino“ direkt ein PWM Signal an den Regler zu schicken, welches dieser auch richtig Interpretiert, sprich Joystick Hoch = Speed Hoch. Da dieser Code allerdings nicht der Code ist den Ich letztendlich nutzen möchte, habe ich einen anderen runtergeladen und zwar von „Todd“ aus dem Endless-Spehre Forum. #include <Wire.h> #include <WiiChuck.h> // Library for Wii Nunchuck #include <Wii.h> #include <ArduinoNunchuk.h> #include <Servo.h> // Library for controlin Servo or ESC WiiChuck chuck = WiiChuck(); Servo myservo; int speed_val; // Speed value int speed_val_cur = 95; // Current speed value int y = 0; // Jaystick value int time = 200; // Delay timer int speed_val_hold; // speed value which will be holded while Z button is pressed void setup() { Serial.begin(115200); chuck.begin(); chuck.update(); myservo.attach(11); // ESC attached to 9 pin of Arduino } void loop() { // If you hold down Z button of Nunchuck you accelerate faster if ((chuck.buttonZ)||(chuck.buttonC)) { if (chuck.buttonZ) { Serial.print(" Z "); time = 100; speed_val_hold = speed_val_cur; // Sets speed value to hold } // If you hold down C button of Nunchuck you accelerate slower if (chuck.buttonC) { Serial.print(" C "); //time = 100; } } else { time = map (speed_val_cur,60,80,100,250); speed_val_hold = 95; } delay(time); chuck.update(); y = chuck.readJoyY(); // Maps the joystick value to the speed value (max speed 130) max posible 179 Serial.println(); speed_val = map(y, -105, 73, 95, 149); // This is what hapens in case we loose a Blue tooth connection if (y > 122) { speed_val = 95; // 60 means – no speed , motor stoped speed_val_cur = 95; // 60 means – no speed , motor stoped speed_val_hold = 95; } // This is whats hapens then we again have BT signal, it just restarts everything if (y == 124) setup(); if (y <= 0) { speed_val_cur = 95; speed_val = 95; } if (speed_val_cur < speed_val) { speed_val_cur = speed_val_cur + 1; } else speed_val_cur = speed_val; if ((speed_val_hold > 95) && (y > 0) ) speed_val_hold++; // If hold button is pressed and joistic moved up – increase speed if ((speed_val_hold > 95) && (y < 0) ) speed_val_hold--; // If hold button is pressed and joistic moved down – decrease speed if (speed_val_hold > 95) speed_val_cur = speed_val_hold; if (chuck.buttonC) { speed_val_cur = 95; //time = 100; } myservo.write(speed_val_cur); // Here we control ESC //—– Printing to screen to see results ——— Serial.print("Joy = "); Serial.print(y); Serial.print(" "); Serial.print("Speed = "); Serial.print(speed_val_cur); } Das wirklich unglaubliche daran ist nun Folgendes: Ich Spiele den Code von Todd auf den Nano auf (Verkabelung bleibt gleich, ebenso wird nicht das USB Kabel des Nanos abgezogen, sprich die Verbindung zw. Nunchuk/Nano/Regler wird nicht unterbrochen) und alles Funktioniert Prima… sobald ich C drücke läuft der Motor im eingestellten Tempo los, mit jedem mal Joystick hochdrücken geht die Geschwindigkeit um den Wert X hoch und wird gehalten. Die Sache wurde die ganze Zeit mit einem 2. Arduino überwacht, darauf war ein Code aufgespielt welcher PWM Signale im Serial Monitor Darstellt. Der Wert muss grob <190 sein, das ist was der Regler als Leerlauf interpretiert, alles darüber nimmt der Regler Anfangs nicht an sonst würde der Motor ja direkt loslaufen. Hat auch gepasst, ich habe die Werte in den Codes so angepasst das sie <190 sind. Wenn ich den Regler von der Spannung Trenne (Arduino bleibt über USB weiterhin verbunden) und wieder verbinde geht noch alles. NUN ABER…! Wird die Spannungsversorgung vom Arduino unterbrochen und wieder verbunden, geht garnichts mehr! Wenn der Bluetooth Nunchuk wieder „gepairt“ ist, reagiert die angeschlossene LED vom Empfangsteil auch auf Tastendrücke, aber das wars. Im PWM Serial Monitor tut sich nichts mehr und der Regler bleibt auch ruhig. Die einzige Möglichkeit es nun wieder lauffähig zu kriegen ist die, das ich den ersten Code aufspiele, dann geht es normal, anschliessend wird wieder Todd’s Code aufgespielt und Funktioniert, bis zum unterbrechen der Spannung auch. Hat jemand ne Idee? ich weiss das geht schon tief rein, aber vllt weiss barney als programmierfuchs ja was? Lg Alex
-
Achso, ich dachte das video wäre von dir eingestellt worden, da der uploader "DJCriZZ" heisst...!?
-
cooles video..! mit welchem schnittprogramm hast du die wackler denn ausgeglichen?!
-
Hey Chrizz, ich dachte die Regler von Alienpower sind eigenbauten von Bruno? Wie heisst dein Händler? Hast du vllt gesehen was für ein Aufkleber auf dem Regler war, sprich welcher "Hersteller" ? LG Alex EDIT: ich glaube den Hersteller ausfindig gemacht zu haben, das programmierinterface sieht identisch wie das von APS aus, ebenso die charakteristik der Regler. http://fliermodel.en.alibaba.com/featureproductlist.html
-
Moin, hier möchte ich meine Umbau des MBS 95 Comp zum Elektro-Mountainboard vorstellen, mit vielen Bildern und begleitenden Kommentaren zu den Bauabschnitten um vielleicht dem ein oder anderen bei Problemen zu helfen. Zurzeit habe ich das Board, Ritzel+Kette für den Antrieb, die Akkus, Sicherung und Kabel. Motor und Regler werden kommende Woche bestellt. Bevor ich zuviel Texte erstmal ein paar Bilder. MBS 95 Comp Abstandshalter M4x15 für Bremsscheibe von http://www.rideflame.de/shop/bremsen/ auf CRYPTIC Felge Ritzel von Maedler "Kettenradscheibe KRL ohne Nabe 04 Tlg. 6mm 76 Zähne Mat. Stahl " http://www.maedler.de/Article/10077600 Bohrung von 15 mm auf 50 mm aufgedreht um nötigen Achsfreilauf zu bekommen. übertragen der Lochabstände am Beispiel der Flame Bremsscheibe auf die 76er Ritzel Ritzel auf Rad Montiert Akkukasten gekantet aus 2mm Alublech Befestigung mittels M6x80 Schraube, geht durch das Brett und wird 2x gekontert um Kräfteschluss jeweils nur am Deck und am Deckel zu gewährleisten. Flügelmuttern zur einfachen Demontage Langlöcher wegen Flex des Decks nächste Schritte: Motorhalterung Verkabelung und Absicherung Steuerungsanlage TO BE CONTINUED.. !
-
Hey Barney, zzt habe ich noch eine normale RC Pistolenfernbedienung, werde mich aber wenn die gröbste Bauphase des Boards durch ist, an deine Arduino Funke waagen, das wird die beste Lösung zu sein. Die Idee mit den verlinkten Funken ist zwar zum erträumen, aber in der Umsetzung dann doch wohl eher kompliziert. Vielen dank für deine detaillierten Antworten. Alex
-
Hallo, biete hier ein Alien Drive System Caliber Truck Mount zum Verkauf. Dieser wurde nur einmal auf die Achse gesteckt, daher kleine Kratzspuren an der Kontaktfläche zur Achse, diese sind unabdingbar bei der installation und würdem jedem selbst passieren, sobald man diese einmal aufzieht. Zum Verkauf steht der gefräste Motor Halter aus Alu, sowie die zugehörigen Schrauben. Das ganze wurde vor 2 Wochen bei Alien Drive System bestellt -> hier der link zum Original: http://www.aliendrivesystems.com/store/p13/Caliber_Truck_mount.html und hat mich inkl. Versand nach DE £38.94 £/Pfund gekostet, was 48,06 € sind. Verkaufe das Teil hier für 40€ Inkl. Versand. Bei Interesse einfach melden .
-
hey Barney, danke für die schnelle Antwort. Du bist ja super fit in der Sache wenn ich mir Deine ganzen Beiträge so anschaue. Dann is es also möglich mit der funke von efun (http://www.electro-fun.de/Zubehoer/e-Skateboard/Elektro-Skateboard-Fernbedienung) und dem passenden controller (zb http://www.electro-fun.de/Zubehoer/e-Skateboard/Elektro-Skateboard-Controller-150-Watt zu kommunizieren? Nun möchte ich aber nicht den 150W Controller für die Brushed Motoren verwenden, sondern an meinen "eigenen" Regler gehen, ist da nicht irgendwo in dem o.g. Controller die Schnittstelle zwischen Empfänger & ESC zu lokalisieren? Interessant wäre zu wissen, was dort für ein Signal weitergegeben wird. Idealerweise wäre das ja ein PWM Signal was dann quasi 1 zu 1 an einen beliebigen ESC weitergeleitet werden kann. Ich glaube darauf bist Du in dem von Dir verlinkten Thread nicht eingegangen, oder habe ich das überlesen? LG Alex
-
Gude, habe bei http://www.electro-fun.de grade folgende, recht günstige Fernbedienung gesichtet. http://www.electro-fun.de/Zubehoer/e-Skateboard/Elektro-Skateboard-Fernbedienung bzw diese bei Pearl (sieht aus wie die Skatey??) http://www.pearl.de/a-NC7321-4022.shtml?vid=917&wa_id=40&wa_num=&utm_source=googleps&utm_medium=cpc&gclid=CjgKEAjwnfGbBRDlxoHrl6uikyESJAD-nzCFF2FmUIUH9tNcPWja-uGGrR8YNrRKoPVgsS6XF3oCkfD_BwE da steht zumindest dabei das es Bluetooth ist. Ist dies mit einem Arduino (mit BT) Empfangbar? Gibt es die möglichkeit das Signal mit einem Eigenbau Controller zu empfangen ? Falls jemand mehr über diesen Controller weiss, über welche Funktechnik wird das Signal hier übertragen? 2,4 Ghz, Bluetooth? ist es ein PWM Signal was generiert wird? LG Alex
-

Polizei / Eboard / München / :-(
axx antwortete auf Christian83's Thema in: Rechtliches (Straßenverkehr, Versicherungen, eKFV)
Sowas habe ich mir schon gedacht. Wie heisst die library? Ist doch über arduino oder? -
Polizei / Eboard / München / :-(
axx antwortete auf Christian83's Thema in: Rechtliches (Straßenverkehr, Versicherungen, eKFV)
Hey Barney, kannst du mir nähere infos zum hase/igel geben? in welcher version 3.1 ist dies enthalten? -
Hallo Jungs, habe zwar schon im Werkstatt Forum etwas geschrieben, aber halte es dennoch für notwendig mich hier mal kurz vorzustellen. Zu Mir: Ich heisse Alex und wohne Eppstein im Taunus zwischen Frankfurt/Wiesbaden, bin 27 Jahre alt und als Flugzeugmechaniker bei der LH Technik tätig. Zurzeit bin ich zusätzlich noch auf der Technikerschule für Elektrotechnik mit dem Schwerpunkt Informations & Kommunikationstechnik. Boardsportarten sind mein Ding, im Winter auf dem Snowboard und im Sommer bisjetzt auf dem Wakeboard, doch da muss was neues her, drum bin ich grade ein Elektro Skateboard am Planen, Offroadtauglich :peace: bis dann
-
Richtiger Motor für gewünschte Endgeschwindigkeit
axx antwortete auf axx's Thema in: Elektro-Skateboard Werkstatt
Hey Barney, vielen dank für deine Tipps, langsam aber sicher habe ich eine Roten Faden dem ich folgen kann. Werde erstmal die Achse bestellen und dann schauen welche möglichkeit ich habe einen Motorflansch zu entwerfen und zu montieren. Bei http://www.maedler.de gibt es übrigens eine gute Auswahl an Ketten oder Zahnradantrieben uvm. LG Alex -
Richtiger Motor für gewünschte Endgeschwindigkeit
axx antwortete auf axx's Thema in: Elektro-Skateboard Werkstatt
habe ich eben gemacht, super tool, vielen dank! Ich muss da nochmal plausible Werte eintackern, komme häufig auf eine viel zu hohe Endgeschwindigkeit. Is es vom Grundsatz her richtig das ich bei Offroad Reifen mit 200 mm Durchmesser einen Motor mit niedrigerem KV Wert nehmen sollte als bei "normalen" Skate/Longboard Wheels? Dies wäre ja notwendig um das höhere Drehmoment bereitzustellen was benötig wird um die grossen Reinfen anzutreiben. Simpler Vergleich: Ich habe 2 Komplett gleiche Setups (Reifen/Übersetzung/Akku/Regler usw..) aber 2 Motoren unterschiedlicher KV Zahl. (200->250zb) Zieht der Motor mit weniger KV genausoviel Strom(A) wie der andere bei gleicher beanspruchung? Das Resultat wäre ja ein Setup mit mehr Anzugsmoment und geringerer Endgeschwindigkeit und ein Setup was genau andersrum charakterisiert ist. Lg Alex -
Richtiger Motor für gewünschte Endgeschwindigkeit
axx antwortete auf axx's Thema in: Elektro-Skateboard Werkstatt
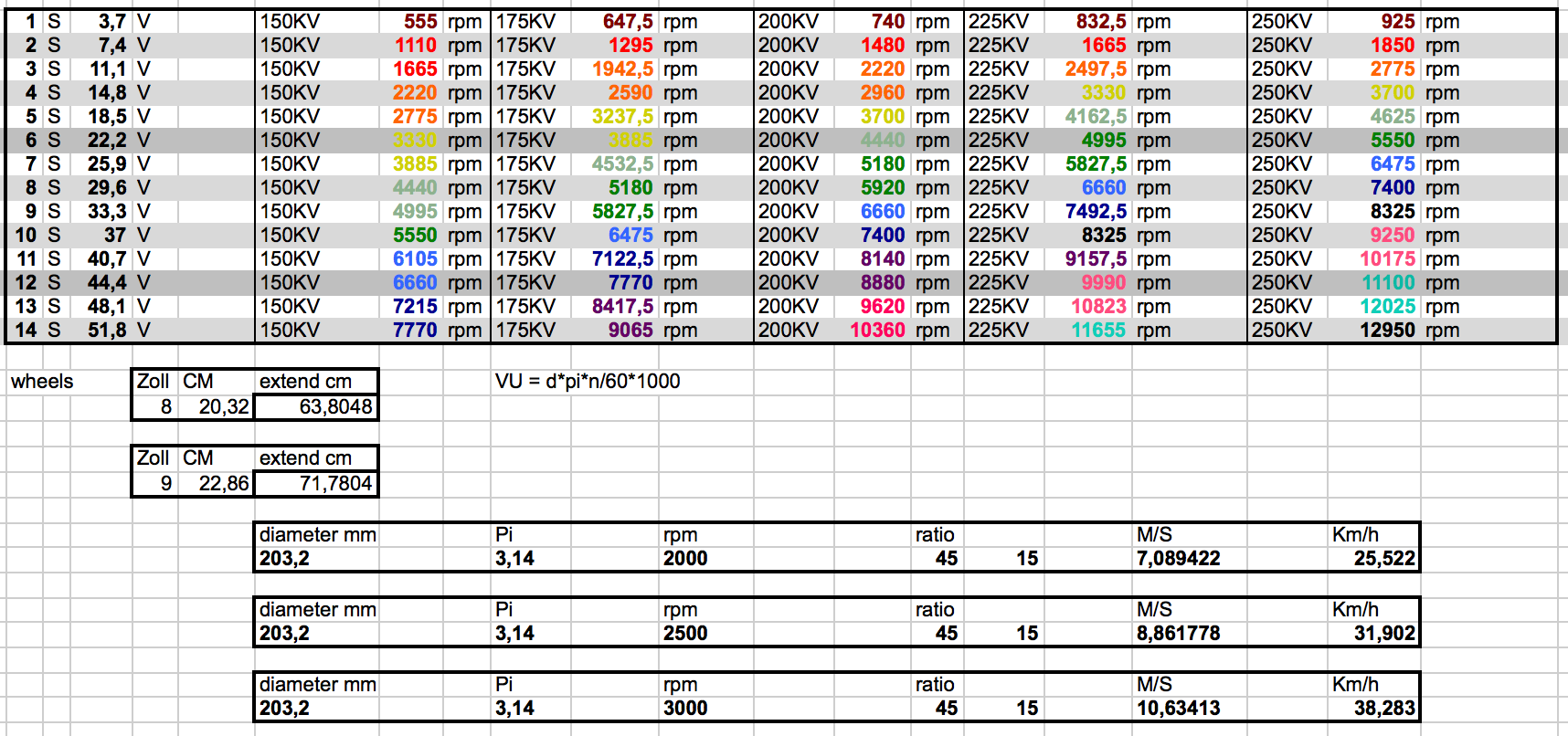
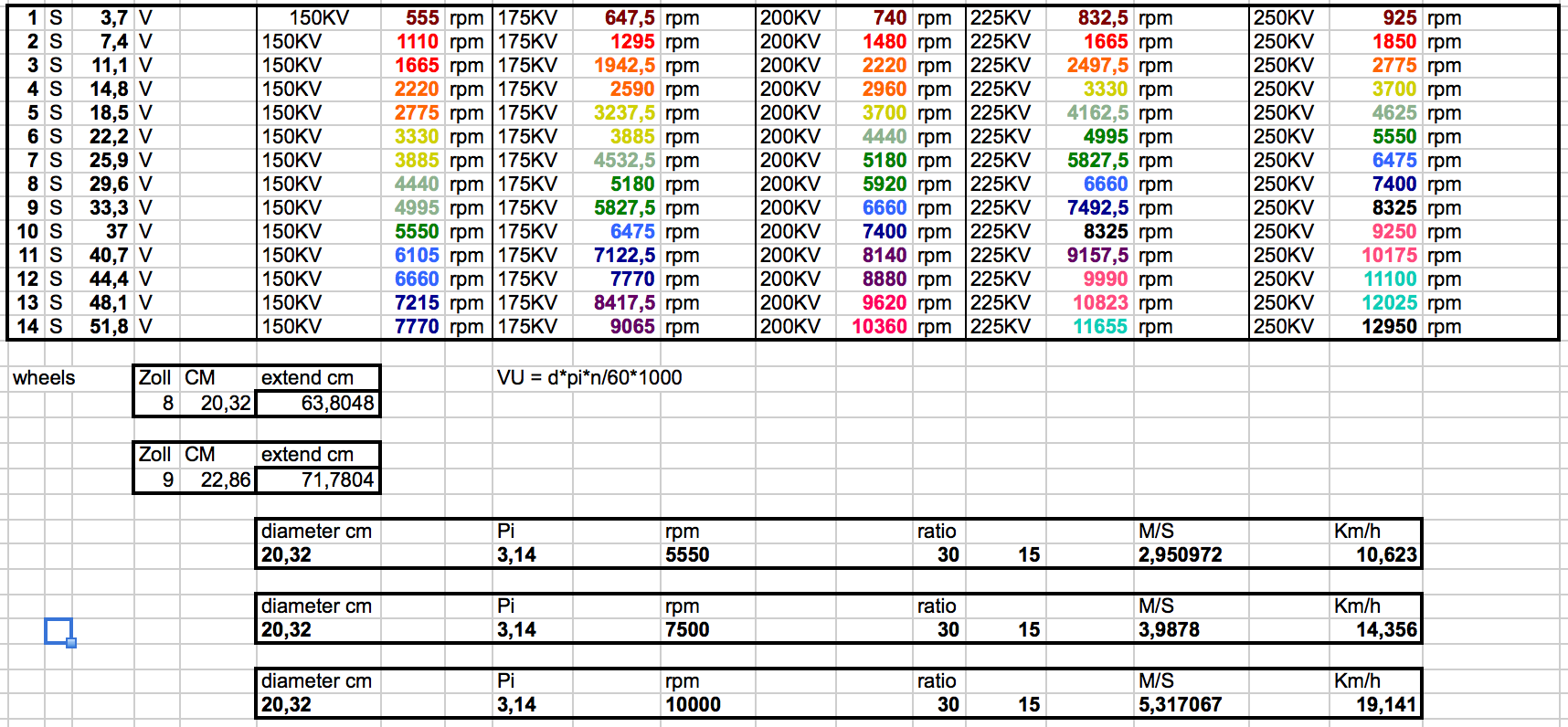
Sorry für die ganzen mehrfachposts, ich habe in der berechnung grade einen fehler entdeckt und zwar habe ich mit cm und nicht mm gerechnet, welche das ergebnis natürlich auch um dem faktor 10 verändert hat. hier nochmal die richtige tabelle: Mappe2.xls.zip
-
Richtiger Motor für gewünschte Endgeschwindigkeit
axx antwortete auf axx's Thema in: Elektro-Skateboard Werkstatt
hier nochmal die xls datei (musste zippen sonst konnte ich sie noch hochladen) Mappe2.xls.zip -
Richtiger Motor für gewünschte Endgeschwindigkeit
axx hat ein Thema erstellt in: Elektro-Skateboard Werkstatt
Servus, ich möchte mir ein All Terrain Board bauen mit ausreichend bis überdurchschnittlich viel Leistung. Endgeschwindigkeit von ca 32 kmh sollte auch Bergauf drin sein. Ich habe etwas in Excel rumgespielt um zu sehen welche Drehzahlen und somit welchen KV Wert ich benötige um auf die gewünschte Endgeschwindigkeit zu kommen. Mir ist klar das dies alles nur die Theorie ist und in der Praxis sicher noch andere Faktoren zum Vorschein kommen die das Ergebnis beeinflussen werden. Ich gehe von 8" Reifen aus, diese haben einen Umfang von ca 63,8 cm. Diesen Umfang habe ich unter berücksichtigung des Übersetzungsverhältnisses auf die Drehzahl verschiedener KV Werte angewand um zu sehen was bei raus kommt.... leider alles nur nicht meine gewünschte Endgeschwindigkeit. Da bei den meisten Motoren ab 50mm die luft oberhalb 270KV dünn ist, frage ich mich nun ob ich das über das Übersetzungsverhältnis kompensieren kann? Es ist doch nicht die Lösung mit 10S-12S Akkus zu Arbeiten? das muss doch auch darunter drin sein oder irre ich mich da? Schaut euch die Tabelle mal an, für fragen und anregungen bin ich gerne offen. LG Alex
-
Hey Nico, danke für die Antwort. Ich habe das Forum ein wenig durchstöbert und habe erfahren dass man sich am besten ein Downhillboard kauft, im besten fall mit einer Bremsanlage, um an den Bremsscheiben die Zahnräder zu befestigen. Eine Halterung für den Motor/die Motoren sind häufig Eigenbauten. Ist es möglich den Motorrhalter an die Achse zu schweissen oder wäre eine Schraub/Klemmverbindung eher angebracht? Habt ihr ein Tipp wo ich die Zahnräder und Ketten herbekomme? LG Alex
-
Hallo Liebe eSkater, mein Name ist Alex und ich bin neu hier im Forum. Ich habe die letzte Nacht viele Artikel hier im Forum gelesen, grade im Werkstattbereich. Meine Interesse liegt stark am Selbstbau eines Boards und da ich am Berg wohne, sollte das Board auch die nötige Leistung haben mich diesen hochzubringen. Zudem möchte ich kein reines Streetboard, sondern grosse Reifen, mit denen ich auch mal im Wald über Stock und Stein fahren kann. Die Antriebstechnik von Alien Power Systems fand ich sehr interessant, zb das Kit mit ESC und Motoren mit 4.4 kW http://alienpowersystem.com/shop/dual-motors/alien-power-system-150amp-4-4kw-twin-motors-kit-2-2/ somit wäre der Antrieb vorerst entschieden, bleibt nur die Frage wie die ganze Suppe an der Achse befestigt wird, hierzu hatte ich mir dieses System von Alien Drive System angeschaut, welches allerdings nur einen Flansch beinhaltet, welcher an normalen Skate Rollen zu befestigen ist. http://www.aliendrivesystems.com/store/p28/Dual_Holey_Truck_Drive_Kit.html ich habe keine Sets gefunden welche es erlauben an die 4" Luftreifen montiert zu werden, wie sie MoBo zB verbaut. Wäre es mögich die Felge von MoBo http://mo-bo.de/product_info.php?info=p1_felge-l-800.html sowie den Zahnriemenkranz http://mo-bo.de/product_info.php?info=p13_zahnriemenkranz-fuer-mb-800.html zu verbauen und mit dem 4.4kW Antriebsystem über die Achse von ADS zu betreiben? Auf Eure Antworten bin ich gespannt. Lieben Gruß & schönes Wochenende Alex