

Dude
-
Gesamte Inhalte
555 -
Benutzer seit
-
Letzter Besuch
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von Dude
-
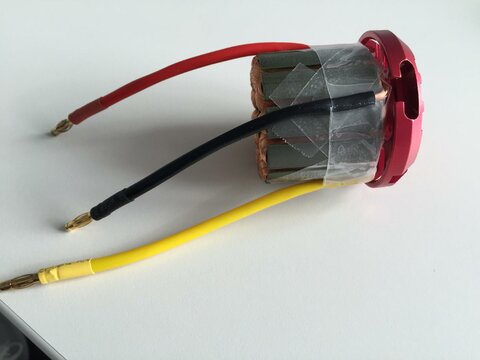
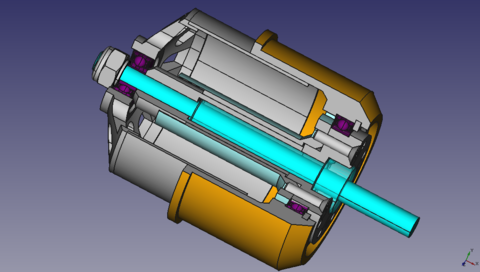
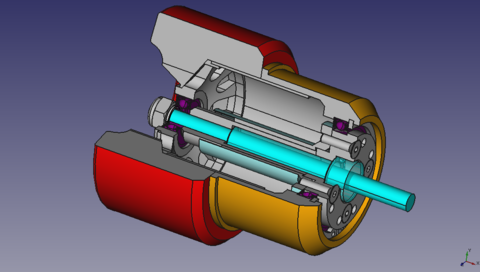
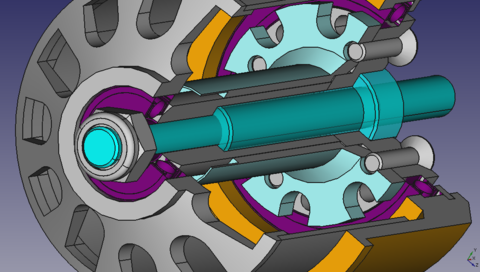
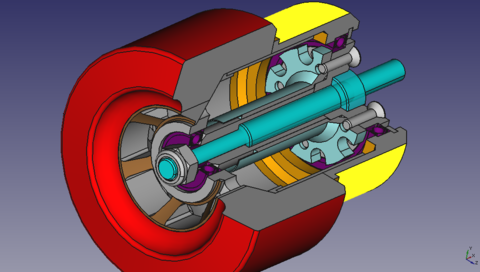
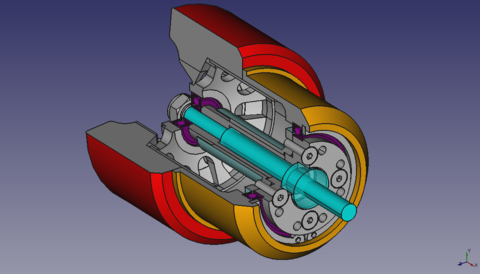
Hey, ich bin seit ein paar Wochen am Entwurf meines neuen eLongboards. Die Sache zieht sich allerdings schon eine ganze Zeit. Um mich selbst ein wenig zu pushen, hab ich mich entschieden, den Projektfortschritt in diesem Thread zu dokumentieren - wird trotzdem noch lange genug dauern Auf die wesentlichen Bauteile hab ich mich bereits festgelegt: Hackbrett Himmelreich (Flex 1) / Paris Trucks (195mm) / Blanc Longboard Wheels (90mm) / 2 x VESC 4.7 / 2 x APS6374 130KV. Motorhalterung und Zahnriemen fehlen nicht, es gibt nämlich keine ... richtig: wird ein Twin-Hubmotor :thumbsup: Zur Steuerung werde ich einen meiner Nunchuks verwenden. Die Ansteuerung der VESCs geschieht im ersten Anlauf über meinen BamBam-Controller am PPM-Signaleingang, alternativ auch direkt mit meinem Nunchuk Kama. Final möchte ich aber auch einen Funkabriss zuverlässig erkennen. Dafür gibt es imho aktuell 3 Möglichkeiten: Nunchuk+Wixels+BamBam+VESC / Nunchuk+Wixels+VESC / Nunchuk+Nunchuk PCB+nRF24L01+VESC. Mal sehn, was es wird. Kriterien für die Motorwahl waren einfach: möglichst kleine KV-Werte damit der VESC nicht zu einer Heizplatte wird und ich nicht mit Lichtgeschwindigkeit über den Asphalt fege (Spannung hoch, Strom runter). Daher fiel die Wahl auf einen APS6374 mit 130KV. Konstruktiv und aus ästhetischen Gründen hätte mir ein 50mm BLDC besser gefallen, die haben bei vernünftigen Leistungen aber zu hohe KV. Wenn ich mit einer Y-Verschaltung der Wicklungen die 130KV des APS6374 um das 1,7-fache reduziere, hab ich bei 8s immer noch eine Maximalgeschwindigkeit (verlustlos, rein kinematisch gerechnet) von 39 km/h bei 90er Wheels. Akku hab ich mich noch nicht entschieden, kommt noch. Würde gerne mal probieren diese selbst zu schweißen - allein weil mir die DIY Lösungen in den Foren zum Bau eines Punktschweißgerätes total gut gefallen Ach ja, Gehäuse, mal sehn (Flexthematik und schön soll's auch aussehen). Ach ja, bevor ich's vergesse: ein riesiges Dankeschön an all die Aktiven im Elektro-Skateboard- und Endless-sphere-Forum. Mein Hackbrett eBuild baut bewusst oder unbewusst auf den zahlreichen Beiträgen, Ideen und Anregungen auf. Ich hoffe, es findet sich auch die ein oder andere hilfreiche Anregung in diesem Thread Sneak preview: Hubmotor Konstruktionsbeschreibung (coming soon) ...
-

Motorhalterungen und Radaufnahmen günstig Produzieren
Dude antwortete auf DevilSTC's Thema in: 3D Druck & CNC
Yep, genau da liegt das Problem. Ich hab mir daher zwei 6374 von APS für mein Hubmotor-Board zugelegt. Die haben je 130 KV und wenn ich das mit einer Y-Verschaltung der Wicklungen die 130 um das 1,7-fache reduziere hab ich bei 8s immer noch ein Maximalgeschwindigkeit (verlustlos, rein kinematisch gerechnet) von 39 km/h bei 90er Wheels. Ich glaube die 50'er Motoren eignen sich wegen der hohen KV Werte nicht so gut für ein Hubmotor-Konzept, obwohl sie von der Geometrie besser geeignet wären. Aber die Ströme werden einfach zu hoch, wenn Du mit der Spannung runter musst. -
Motorhalterungen und Radaufnahmen günstig Produzieren
Dude antwortete auf DevilSTC's Thema in: 3D Druck & CNC
Hi Devil, wieviel KV hat denn Dein 50er Motor? Dude -

Vom Album Hackbrett
-

Vom Album Hackbrett
-

Vom Album Hackbrett
-

Vom Album Hackbrett
-

Vom Album Hackbrett
-

Vom Album Hackbrett
-

Vom Album Hackbrett
-

Vom Album Hackbrett
-
Vom Album Hackbrett
-

Vom Album Hackbrett
-

Vom Album Hackbrett
-

Vom Album Hackbrett
-
Vom Album Hackbrett
-
Vom Album Hackbrett
-
Vom Album Hackbrett
-
Vom Album Hackbrett
-
Vom Album Hackbrett
-
Antriebsrechner Daten werden benötigt
Dude antwortete auf barney's Thema in: Elektro-Skateboard Werkstatt
Hi Barney, bitte nicht so ganz ernst nehmen (nur ein bisschen), mir kam da aber vor ein paar Tagen (Bierlaune) so was in den Sinn: Implementierung einer gpx-Importfunktion. Die gps-Daten müssten natürlich Höheninformationen enthalten und Du kannst dann berechnen, ob bzw. wie oft man die eingelesene Strecke schafft. Dann wären auch die leidigen Überlegungen hinsichtlich "was gebe ich für Steigungen ein" vom Tisch. Man müsste eben eine durchschnittliche Geschwindigkeit vorgeben oder auch noch abschittsweise definieren oder mit dem Fahrrad die Strecke in der Zielgeschwindigkeit abfahren und als gpx aufnehmen. Ich hab auch irgendwo eine JS-Bibliothek runtergeladen, mit der man gpx-Dateien einlesen kann und ein Höhenprofil plotten. Leider kann ich kein JavaScript. VG Dude -
Hi Attila, ist das 22mm - Deck sehr steif oder hat es noch ein wenig Flex?
-
Ja, hätte ich dazu sagen sollen: Longboard. Auf dem MAC geht es nativ leider nicht, ich hab auch schon bei Bruno nachgefragt. Daher: MAC + VirtualBox (Orakle) & Windows (hatte noch eine ältere Lizenz verfügbar) geht, obwohl ein Gerätetreiber für den USB installiert werden muss (hat mich auch gewundert). VG Dude
-
Ich fahre mit dem Alien ESC. Die Bremswirkung ist sehr gut und kann in der Stärke soweit hochgestellt werden, dass sie Dich vom Board holt (100% = Stillstand). Die Schwachpunkte sind aber zum einen, dass die max. Bremskraft "nur" proportional zu der Fahrgeschwindigkeit festgelegt werden kann, d.h. bei ordentlich Tempo greift die Bremse auch schärfer zu. Der andere Nachteil ist die sog. ABS-Bremse. Das stottert einfach beim Bremsen und das ist nicht angenehm. Es soll aber eine neuere Firmware für manche Alien ESC's geben (leider nicht für meinen), wo das weg sein soll.
-
Mit dem Helicoil Einsatz bleibt die Gewindegröße halt erhalten - das ist bei begrenzter Wandstärke von Vorteil. Das Entscheidende ist aber, dass durch den gehärteten Einsatz das Gewinde selbst tragfähiger wird. Ich hab so einen Einsatz mal in einem Grauguß-Motorblock (Benziner) verwendet, als die Bolzen für den Zylinderkopf im Block nicht mehr hielten. Hat gehalten ... und die Belastungen sind da ganz ordentlich. Ich geb zu, ist aber eine Luxuslösung:thumbsup:
