

Beatbuzzer
-
Gesamte Inhalte
589 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
1
Inhaltstyp
Profile
Forum
Articles
Wiki
Galerie
Kalender
Alle erstellten Inhalte von Beatbuzzer
-
Aber sowas von. Ich dachte genau das gleiche, als ich Deine Bilder sah. Hab schon überlegt, morgens erst zum Hotel zu kommen um das Spektakel mitzuerleben:p
-
Bin doch etwas überrascht, dass hier einige Erwachsenere dabei sind. Steht ja nicht bei jedem gleich das Alter. Im ersten Moment hätte ich dann doch getippt, dass der Schnitt bei <18 liegt. Aber das freut mich so ja umso mehr, orientiere mich lieber nach oben als nach unten, um auch mal ne Lanze für die Ü30 zu brechen:D
-
Das war eher als Spass auf die Ideen von Sonni gemeint Fiel mir da grad wieder ein, dass ich mal in Visual basic für PC nen Snake programmiert hatte. Meist gibts aber auch noch so ein "box-fill" Command. Wo man vorher mit zwei Koordinaten ein Rechteck angibt, welches dann einfach der Reihe nach mit Pixeln vollgeschoben wird. Macht aber bei Kreis und Linie nicht soviel Sinn. Bei Text evtl. schon eher, wenn man die Buchstaben immer als 5x7 Block hinterlegt. Dann könnte man eine Subroutine bauen, wo man nur noch ne Startkoordinate und zwei Farben (Font- und Back-Color) übergibt.
-
Aber nur wenn ich "umme Wurst" mitfahren will. Für just for Fun reicht auch die Anmeldung hier im Forum als von Kai betitelte "Forentreffen-Anmeldung"?!
-
Schönes Ding! Hast Du über Hardware SPI oder in Software (bit-banging^^) angesteuert? Ich hatte mal ein Siemens S65 Handydisplay per Software SPI an nem Atmega32 mit 16 MHz. Das taugte nur zum Schreiben von kleinen Bereichen, sonst gab es sichtbaren Bildaufbau. War eher nichts für Echtzeit-Messwerte Aber mit Hardware SPI und den recht kurzen Textzeilen sollte da schon was gehen. PS: Snake-Code hab ich hier für VB-net, stammt von nem verregneten Wochenende. Das könnten wir portieren
-
Nochmal kurz zum Verständnis: Die 10€ Startgebühr zahlt, wer im Wettkampf mitfahren will. Wer dort nicht mitfahren möchte, zahlt normale 13€ (11€ online) Messeeintritt und kann dann auf der Freifläche just for Fun cruisen und darf trotzdem noch zu SportsOVER ab 18:00 bleiben? Klingt ja ziemlich geil
-
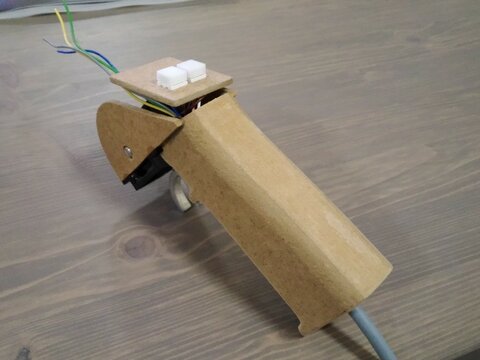
!progress!: Wow, kaum zu glauben, dass es schon so lang her ist...naja Ende letzten Jahres war viel los und wenig Zeit zum bauen. Aber nun soll es mal weiter gehen, auf das ich bis zum sports-now Event vielleicht doch noch was fahrbares hinbekomme. Hier mal ein paar Bilder zum Handregler. Für den Gasgriff selbst kam eine Hebelage aus einer alten Knüppel-Fernsteuerung zum Einsatz. Den Knüppel selbst hab ich aber durch einen selbstgefeilten Abzug ersetzt: Das Gehäuse besteht aus drei zusammengeleimten MDF-Brettern, welche anschließend etwas in Form gefeilt und geschliffen wurden. Eine Pistolengriff-Funke hat dabei ein wenig Modell gestanden: Rückseitig oben kommen noch zwei Taster, welche später für Licht und einen eventuellen Tempomat oder Hupe oder so zuständig sein könnten. Hauptsache sie sind erstmal drin, denn haben ist besser als brauchen
-
rückseitig zwei Taster für geplantes Licht und Tempomat
Beatbuzzer hat ein Bild in der Galerie erstellt in: E-Boarder Alben
Vom Album Eigenbau E-Board
-
Gashebel von alter Knüppel-Funke ausgeschlachtet.
Beatbuzzer hat ein Bild in der Galerie erstellt in: E-Boarder Alben

Vom Album Eigenbau E-Board
-
Griff aus MDF geleimt und geschliffen.
Beatbuzzer hat ein Bild in der Galerie erstellt in: E-Boarder Alben

Vom Album Eigenbau E-Board
-
Bin ja glatt am Überlegen, auch mal vorbeizugucken. Hannover ist ja hier direkt um die Ecke und wenns nicht nur ums Fahren geht (hab momentan weder Board fertig, noch große Fahrerfahrung), dann kann man ja auch mal bisschen quatschen und paar Leute kennen lernen.
-
Es kommt auch auf die Hebelkräfte an. Selbst ne 12er Welle kannst bei ner Bodenwelle verbiegen wenn sie vom Haltepunkt 150mm in jede Richtung frei schwebt, bevor der Reifen kommt (extremes Beispiel). Auch das Material der Welle spielt ne Rolle. Stahl ist nicht Stahl. Ich hab in meinem Aufbau 16mm Achsen aus 115CrV3, welche in nem 40x40 Aluvierkant sitzen. Sie stehen bis zum Rad knapp 30mm frei. Mit anderen Worten: Man kann es auch übertreiben, aber dann weiß man, dass sich da garantiert nichts biegt
-
6mm ist auch nicht 5mm, sondern 1mm mehr Das entspricht einer Vergrößerung der Fläche von ca. 50%.
-
Sorry,<br />
aber ich hab im Moment schon kaum Zeit, mal an meinem Bord weiterzumachen. Da wird wohl erstmal nichts draus werden.<br />
Grüße!
-
Elektronik kaputt vom Abschleppen?
Beatbuzzer antwortete auf MAF's Thema in: Elektro-Skateboard Werkstatt
Hier mal das Datenblatt, was höchstwahrscheinlich zu Deinem Treiber gehört: http://www.irf.com/product-info/datasheets/data/irs2108.pdf Auf Seite 1 hast Du gleich ein kleines Schaltbild und auf Seite 5 sind die Pins beschrieben. -
Oder gleich logic-level MOSFET nehmen. Die machen bei 5V auch nach Datenblatt schon mit definierten Werten auf. Z.B. IRL3803 oder für etwas mehr Spannungsreserve IRLZ44N. Wegen den dünnen Beinchen des TO-220 Gehäuses würde ich da zur Gewissensberuhigung 2-3 parallel schalten. Kost ja nichts im statischen Betrieb als Schalter. Um die "dicken Dinger" voll aufzusteuern, würde auch ein kleiner Transistor (oder Optokoppler wenn mans trennen möchte) gehen, welcher direkt die Akkuspannung über einen Widerstand ans Gate legt. Parallel zum Gate dann noch einen Entladewiderstand und eine 12V Z-Diode, damit man bei hohen Akkuspannungen und Spikes den FET nicht gefährdet. @barney: High Side Driver würde aber ne extra Versorgungsspannung um Vgs höher als die Akkuspannung brauchen, dafür könnte man dann aber den Pluspol schalten und hätte feste Massen.
-
Das wird am Timing liegen. Der XERUN ist ja eher für wenig-polige Innenläufer im Car. Was hast Du da aktuell eingestellt, ich tippe mal auf zu niedrig. Werkseinstellung ist laut einer Anleitung die ich grad gefunden hab 15°. Taste dich mal Stufe für Stufe nach oben und beobachte das Verhalten.
-
Die bringt doch der Motor schon mit. Der Unterschied zum klassischen step-up ist nur, dass das Magnetfeld nicht über eine Eingangsspannung wieder aufgebaut wird, sondern über die Drehung des Motors. Also wenn der FET die Motorwicklung kurzschließt, dann steigt der Strom in der Motorwicklung. Öffnet er, dann will der Strom ja weiter fließen (Prinzip Induktivität halt, wem erkläre ich das) und die Spannung steigt. Wenn sie größer als die Akkuspannung plus Diodenflusspannung des anderen FETs der Halbbrücke ist, fließt Strom zum Akku. Beim nächsten schalten des FETs gehts von vorn los. Je nach Tastverhältnis ändert sich jetzt der Strom (=Bremsmoment/Bremswirkung) durch die Wicklung.
-
Wie auch in deinem Link schon geschrieben steht ist es hier besser, mehrere kleine einzulöten. Als Beispiel haben 2x 470 µF einen geringeren Innenwiderstand als 1x 1000 µF, halten einen höheren Ripple-Strom aus und haben mehr Oberfläche um Verlustwärme abzuführen. 3x 330 µF wären nochmals eine Verbesserung. Das bringt meiner Ansicht nach nicht nur bei längeren Akku-Kabeln, sondern immer eine Verbesserung, da die Hersteller (besonders Fernost) gerne an den C's sparen. Hallo zurück! Wie sieht das schematisch aus? Hast du da näheres zu? Meiner Ansicht nach ist das Rückspeisen einfach ein Nebeneffekt, da durch die Motorwicklung über die PWM am FET und der Diode des anderen FETs quasi ein step-up-Schaltregler gebaut wird, der in die Versorgungsspannung der FET-Brücke speist und somit den Akku lädt.
-
Verlängerung der Motorkabel führt zu etwas mehr Stör-Abstrahlung. Da die Strecke zwischen Fernbedienung und Empfänger beim boarden ja eher kurz ist, sollte das aber gehen. Einzig EMV-Probleme könnte es geben, aber nun gut. Du willst dein Board ja nicht auf den Markt bringen Lange Kabel in Richtung Akku stellen dann ein Problem dar, wenn der Widerstand zu hoch wird. Beim bremsen fließt nämlich Strom vom Regler in Richtung Akku (Bremsenergierückgewinnung). Gibt es hier hohe Widerstände, kann die Spannung am Regler so hoch ansteigen, dass er zerstört wird. Abhilfe schafft ein von der Spannung großzügig ausgelegter Regler und etwas dickere Zuleitung ohne unnötige Steckverbindungen. Die Kondensatoren können bei zu hohen Widerständen auf der Zuleitung nämlich nicht helfen. Diese übernehmen nur einen Teil des Ripple-Strom, um die meist eh schon viel zu knappen Kondensatoren am Regler zu entlasten.
-
Danke für die Rückmeldungen und das Lob! Angestrebt hatte ich am Anfang 20 kg. So wie es hier montiert ist: http://www.elektro-skateboard.de/forum/bilder/eigenbau+e-board-288/chassis-komplett-montiert-2445.php ...wiegt es 17,4 kg. Da fehlt dann noch Akku, Controller und ein wenig Kabel. Ausgelegt ist das ganze erstmal auf 8S 15Ah Headway-LiFePo4, die nackt noch 4 kg wiegen. Der Controller bringt 700 g auf die Waage. Selbst wenn man nochmal großzügig aufrundet, wird das Gesamtgewicht unter 25 kg bleiben. Damit liege ich noch deutlich unter den Werten von Mo-Bo All-Terrain und Gnarboard Commuter, welche ich von der Größe her mal als Vergleichbar ansehe. Die von mir verwendete Motorbauform gibt es bis 750W bei nur gut 200g mehr Gewicht pro Motor. Damit läge ich sogar leistungsmäßig über den Gnarboards. Durch Aufdopplung meiner Akkus läge ich dann bei 792 Wh Akkukapazität und etwa 27 kg Gewicht. Also 52 Wh mehr im Akku, 100 W mehr an der Welle und 5 kg leichter und das trotz schwererer LiFePo4-Technologie. kurzum -> für den Anfang bin ich ganz zufrieden
-
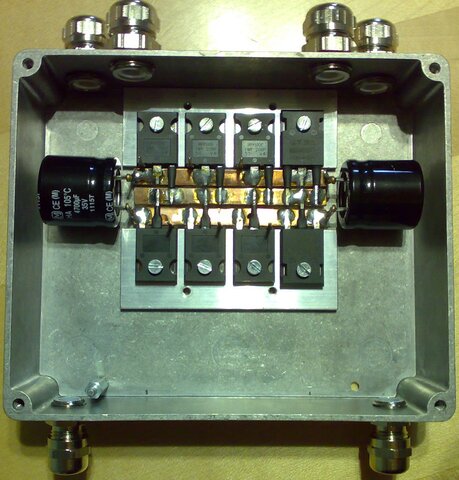
Da die Mechanik nun zum größten Teil abgehakt ist, geht es jetzt etwas mit der Elektronik weiter. Einen Rückwärtsbetrieb fand ich nicht wirklich sinnvoll, deshalb hab ich mich für einen 2-Quadranten-Steller entschieden. So kann man beim Bremsen noch ein bisschen Energie in die Akkus zurück laden. Zuerst der grobe Teil. 2x 3 FETs mit einer Freilaufdiode und zwei Low-ESR Elkos: Zur Steuerung kommt eine Platine drüber. Sämtliche Signale für/von Handregler, Beleuchtung, Treiber der FET-Endstufe, Akkuspannung laufen in einem Atmega168 zusammen und lassen sich nach Lust und Laune kombinieren. Weiterhin werden hier aus der Akkuspannung noch stabile 12V und nochmal potentialfreie 12V für den FET-Treiber sowie 5V für den µC erzeugt: Und hier nochmal ein Überblick über das offene Gehäuse: Und das Gehäuse von außen. Drei Verschraubungen seitlich für Kabel von Licht und Handregler. Vorn zwei Verschraubungen und zwei Verschlusskappen für vorerst zwei Motoren. Hinten die fest angeschlossenen 6mm² Silikonkabel mit 6,5mm Goldstecker. Nicht sichtbar auf der anderen Seite ein IP 65 EIN/AUS-Schalter:
-
Das geschlossene Gehäuse des Controllers.
Beatbuzzer hat ein Bild in der Galerie erstellt in: E-Boarder Alben

Vom Album Eigenbau E-Board
-
Hier die unten liegende FET-Halbbrücke des Controllers.
Beatbuzzer hat ein Bild in der Galerie erstellt in: E-Boarder Alben
Vom Album Eigenbau E-Board
-
Hier die über den FETs liegende Controllerplatine im Detail.
Beatbuzzer hat ein Bild in der Galerie erstellt in: E-Boarder Alben

Vom Album Eigenbau E-Board